INIT

INIT:本节内容正式开始。action!
本小节我们来建立一个STM32的工程,这个STM32的工程结构还是比较复杂的,需要用到很多文件,之后我们的代码也都是需要建立在工程结构上的。
所以,在开始学习后续内容之前,我们先来学习一下如何新建STM32的工程。目前STM32的开发方式主要有基于寄存器的方式、基于标准库也就是库函数的方式和基于HAL库的方式。
基于寄存器的方式和我们51单片机的开发方式一样,是用程序直接配置寄存器,来达到我们想要的功能。这种方式最底层最直接,效率会更高一些。但是由于STM32的结构复杂,寄存器太多,所以基于寄存器的方式目前是不推荐的。
基于库函数的方式是使用ST官方提供用的封装好的函数,通过调用这些函数来间接的配置寄存器。由于ST对寄存器封装的比较好,所以这种方式既能满足对寄存器的配置,对开发人员也比较友好,有利于提高开发效率。我们本课程使用的就是库函数的开发方式。
最后一个基于HAL库的方式,可以用图形化界面快速配置STM32。这个比较适合快速上手STM32的情况。但是这种方式隐藏了底层逻辑。
如果你对STM32不熟悉,基本只能停留在很浅的水平。所以目前暂时不推荐HAL库。但是推荐你学过标准库之后,去了解一下这个方式,毕竟这个HAL库还是非常方便的。
那使用库函数的方式,我们需要准备一个STM32库函数的压缩包。大家可以在我提供的资料链接里找到固件库的文件,然后可以看到STM32F10x标准外设库这个压缩包,我们先把它解压。打开解压后的文件夹,在这里就是酷函数的文件夹目录了。
好,那接下来我们就正式开始新建一个基于标准库的工程。首先我们需要先建立一个存放工程的文件夹,比如在D盘、E盘等位置。那我这里方便起见,就在桌面新建了,起个名字,可以叫STM32Project。以后我们的工程都存在这个文件夹下,这样比较方便管理。
下面开始新建工程。
一、选择对应芯片的器件支持包
选择器件支持包为ST32F103C8
二、添加工程所需的必要文件
1. 复制STM32的启动文件
现在这个工程还是不能直接用的,我们需要给他添加一些工程的必要文件。
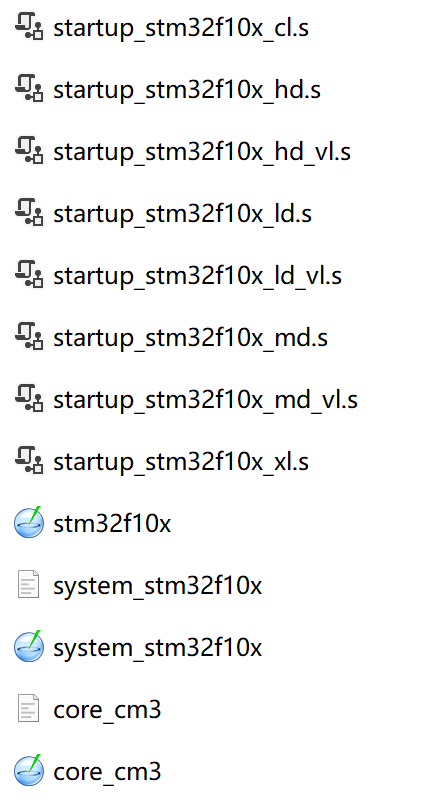
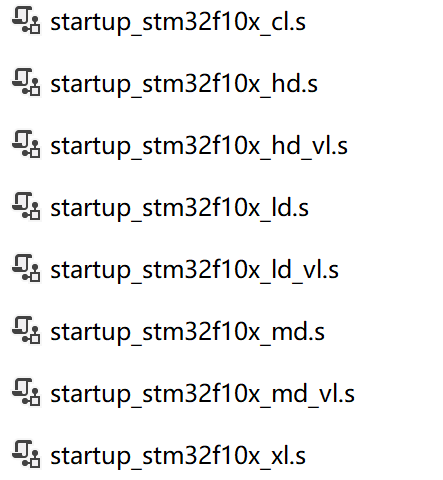
D:\江科大 STM32\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\arm
图:STM32的启动文件
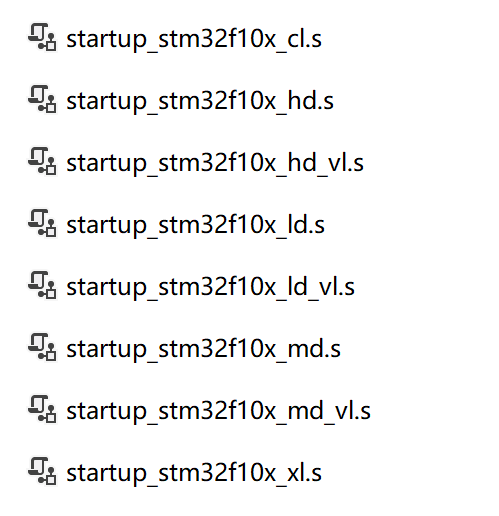
那这些就是STM32的启动文件,STM32的程序就是从启动文件开始执行的。
我们把这些文件全部都复制下来,然后回到工程模板文件夹里,可以看到这些就是我们刚才新建工程自动生成的文件。
图:刚才新建工程自动生成的文件
2. 在工程目录中新建Start文件夹用来存放工程所需文件
2.1 复制复制STM32的启动文件到工程目录的Start文件夹
那如果直接把启动文件也放在这里,就有点太乱了,是吧?所以我们需要新建一个文件夹,可以叫做Start。然后把启动文件粘贴到这里面。
图:把启动文件粘贴到Start文件夹
2.2 复制外设寄存器描述文件stm32Ff10x.h和用于配置时钟的system文件
接着我们回到固件库的STM32F10x文件夹,可以看到stm32Ff10x.h和两个system开头的文件。
这个stm32Ff10x.h,就是STM32的外设寄存器描述文件。它的作用就跟51单片机的头文件REGX52.H一样。是用来描述STM32有哪些寄存器和它对应的地址的。
这两个system文件是用来配置时钟的。STM32主频72MHz,就是system文件里的函数配置的。
那我们把这三个文件复制下来,也粘贴到start文件夹下。
图:D:\江科大 STM32\固件库\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x
图:D:\Keil5Project\STM32Project\2-1 STM32工程模板\Start
2.3 复制内核寄存器描述文件core_cm3.h和内核的配置函数core_cm3.c
接下来,因为这个STM32是内核和内核外围的设备组成的,而且这个内核的寄存器描述和外围设备的描述文件不是在一起的。所以我们还需要添加一个内核寄存器的描述文件。
我们可以打开CM3 CoreSupport,这2个CM3(Cortex-M3)文件就是内核的寄存器描述,当然它还带了一些内核的配置函数,所以多了个点儿.c文件。我们把它俩一并复制下来,也粘贴到Start文件夹下。
到此为止,我们工程的必要文件就复制完成了。
图:D:\江科大 STM32\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\CoreSupport
图:D:\Keil5Project\STM32Project\2-1 STM32工程模板\Start
3. 在Keil工程中新建Start文件夹并将Start所需文件加入进来
3.1 在Keil工程中新建Start文件夹
然后我们回到Keil软件,把我们刚才复制的那些文件添加到工程里来。我们可以点击选中这个Source Group,然后再单击一下,把这个组改一下名字,也叫Start。
图:将Source Group改名为Start
3.2 将Start文件夹所需的文件添加进来
接着右键,选择添加已经存在的文件到组里,打开Start文件夹,把下面这个文件过滤器选择all files,这样我们就能看到文件夹里的所有文件了。
我们首先添加一下启动文件,这个启动文件有很多分类,我们只能添加其中一个。我们视频所用型号需要选择这个后缀为md.s的启动文件,至于启动文件怎么选择,我等会再讲。
我们选中它,点击add。然后剩下的.c和.h文件都要添加进来。我们可以按住Ctrl键,然后依次选择它们,点击Add,然后Close,这样我们Start文件夹里面的文件就添加好了。
图:添加完启动文件之后的Project目录
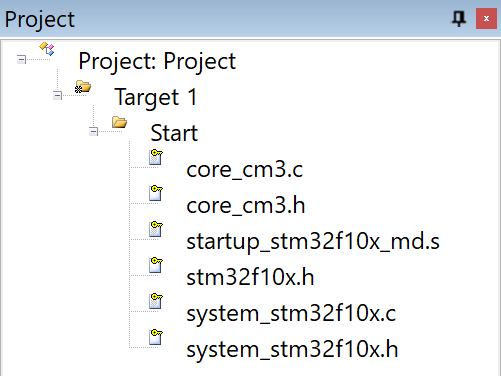
这里的文件都是STM32里最基本的文件,是不需要我们修改的,我们添加进来即可。大家可以看到这个文件图标上带了个小钥匙,这个意思是他是个只读文件,我们可以打开试一下,这些信息都是不让我们修改的。
3.3 在Keil工程中添加头文件路径
最后我们还需要在工程选项里添加上这个文件夹的头文件路径,要不然软件是找不到.h文件的。
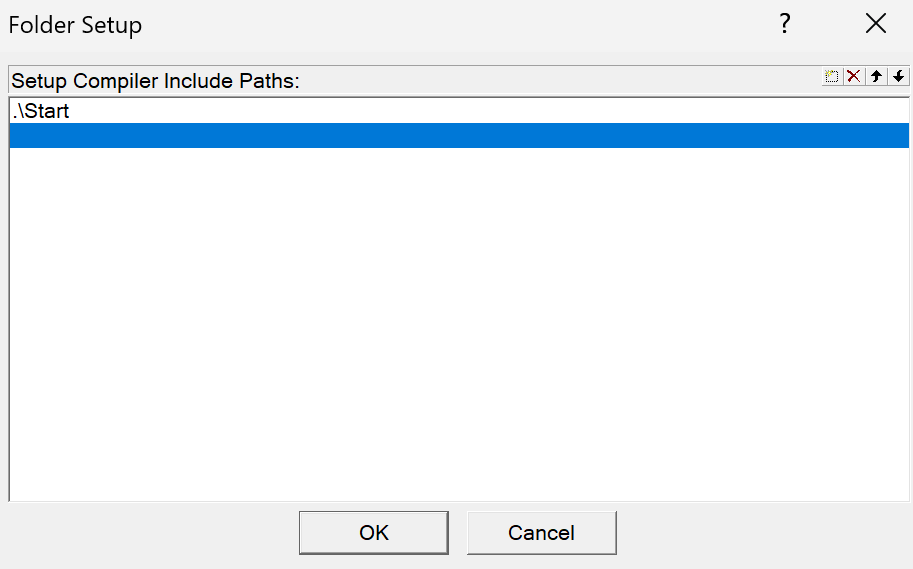
我们点击这个魔术棒按钮,打开工程选项,在C/C++里找到这个Include Paths栏,然后点击右边三个点的按钮,在这里新建路径,然后再点三个点的按钮,把Start的路径添加进来,点击ok,这样就把这个文件夹的头文件路径添加进来了。
图:添加头文件路径
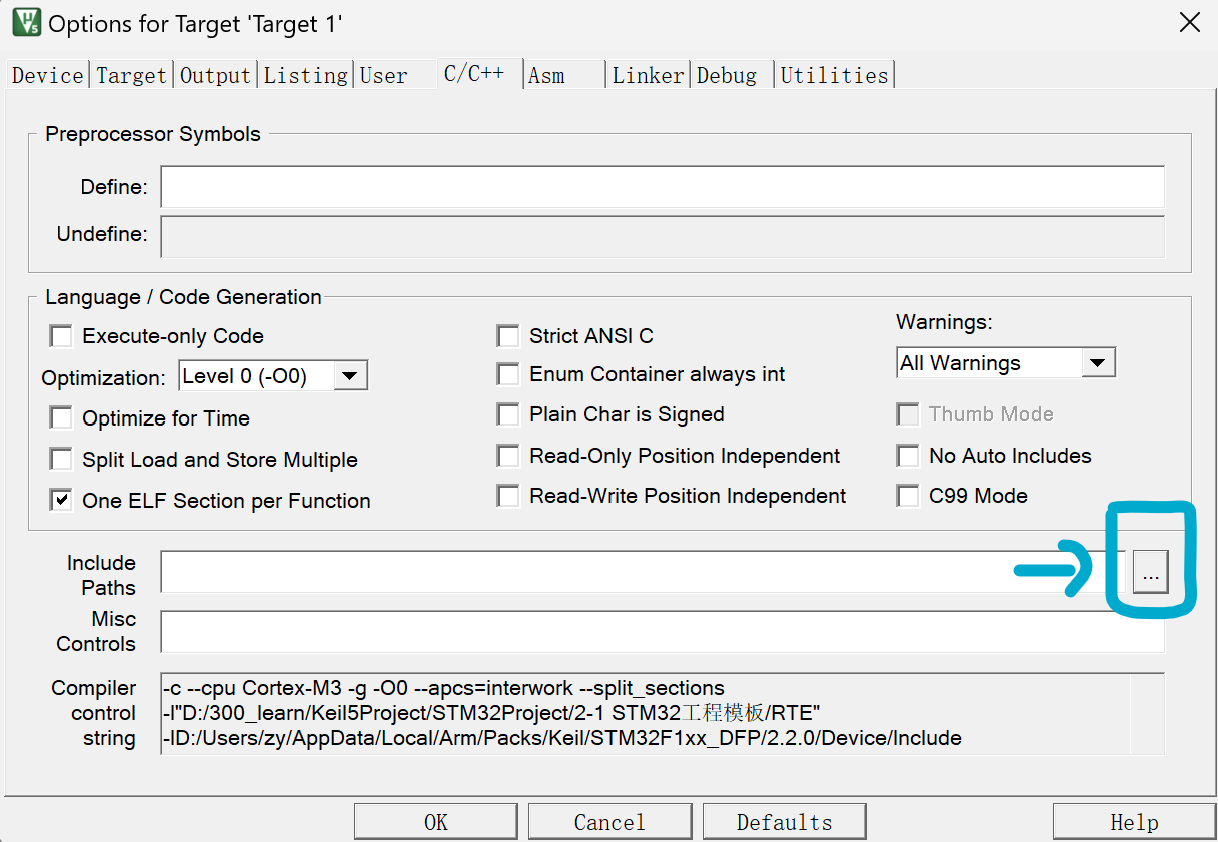
图:新建 头文件路径
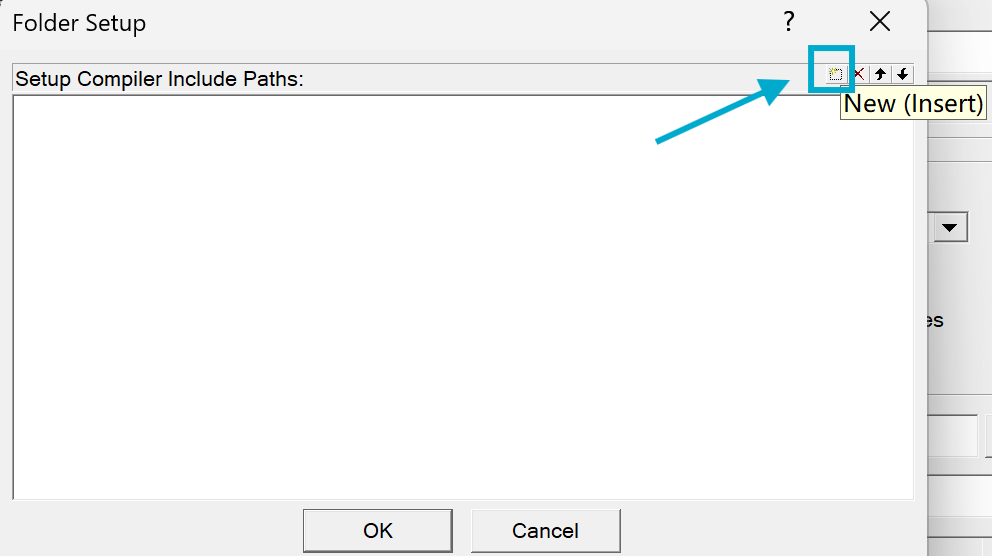
图:添加Start文件夹头文件路径成功
三、在Keil工程中新建User文件夹存放.c代码并编写代码
1. 在Keil工程中新建User文件夹
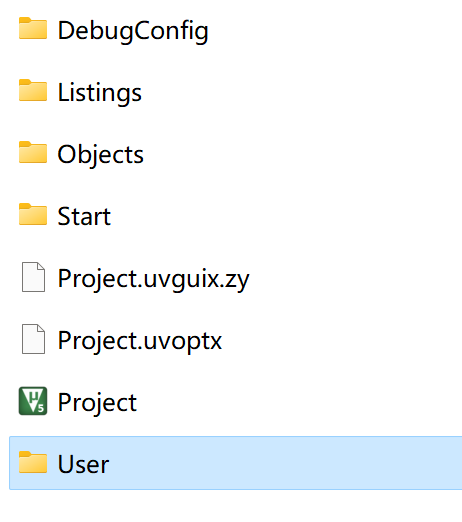
接下来我们再新建一个main函数,看看这个工程是不是可行。我们打开工程文件夹,然后新建一个文件夹。叫做User,我们的main函数就放在这个文件夹里。
图:在工程文件夹目录下新建User文件夹
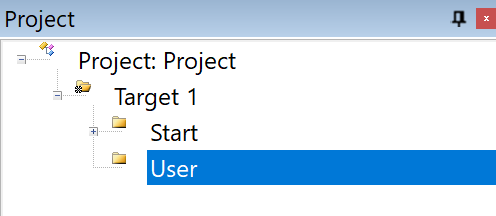
然后Keil里,在Target这里右键,点击添加组,改个名字叫User。
图:在Keil里添加组
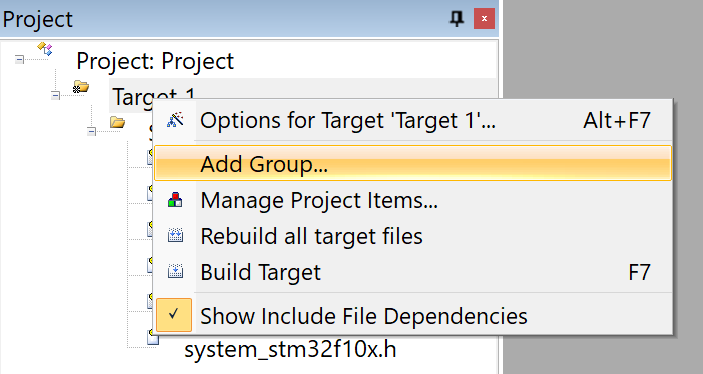
图:将新添加的组命名为User
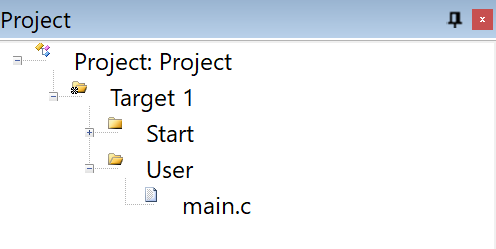
2. 在Keil工程中User文件夹新建main.c
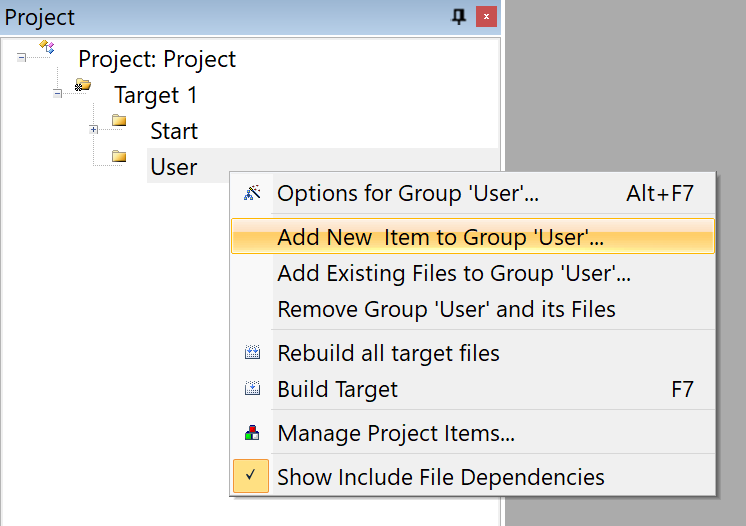
然后在User上右键,点击添加新文件,选择.c文件,名字叫main。
图:在User文件夹 添加新文件
下面的路径注意一下,要选择User文件夹,要不然默认是放在文件夹外面的。然后点击Add,这样我们就有了main.c文件了。
那在工程文件夹的User目录下也可以看到我们新建的main.c文件。
图:选择路径为User文件夹 添加main.c。
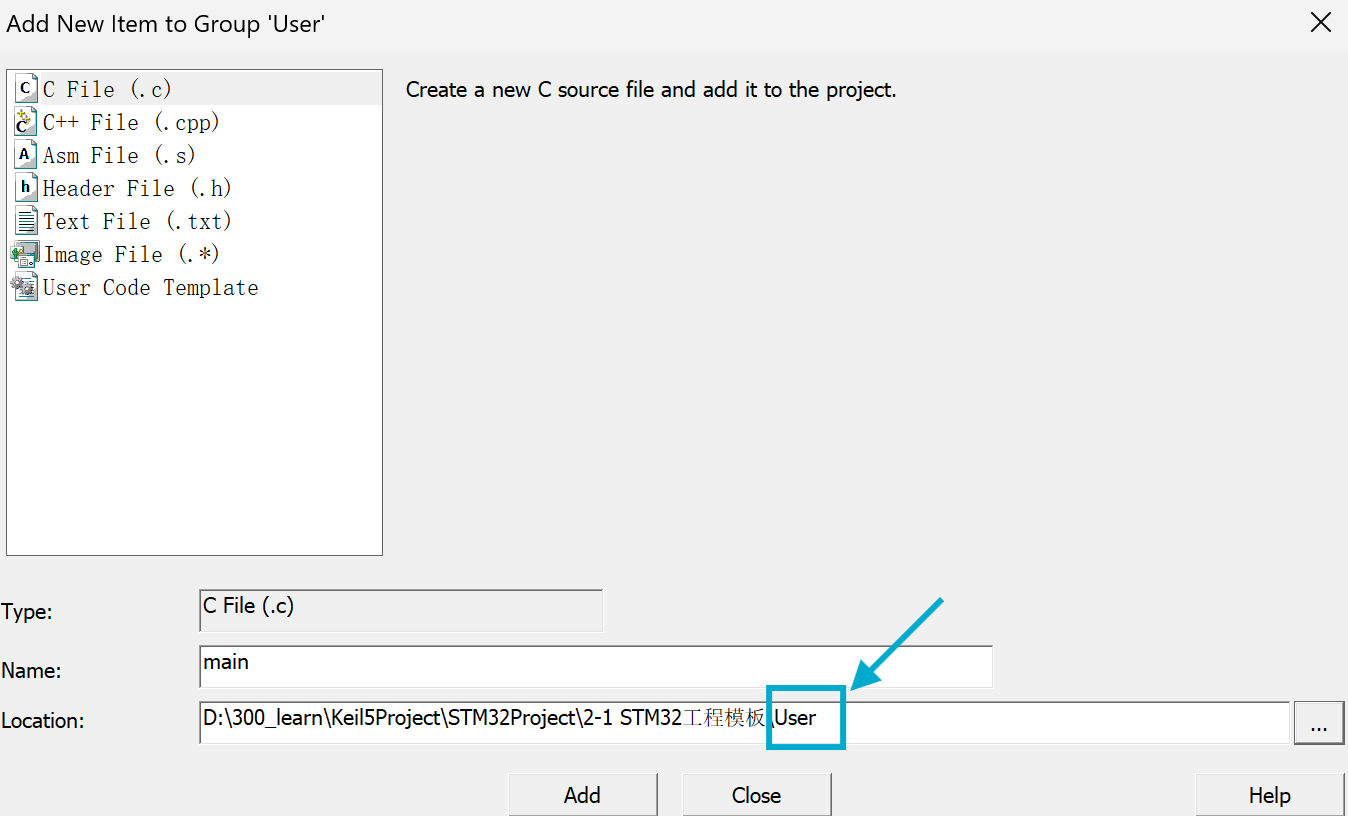
图:添加main.c成功
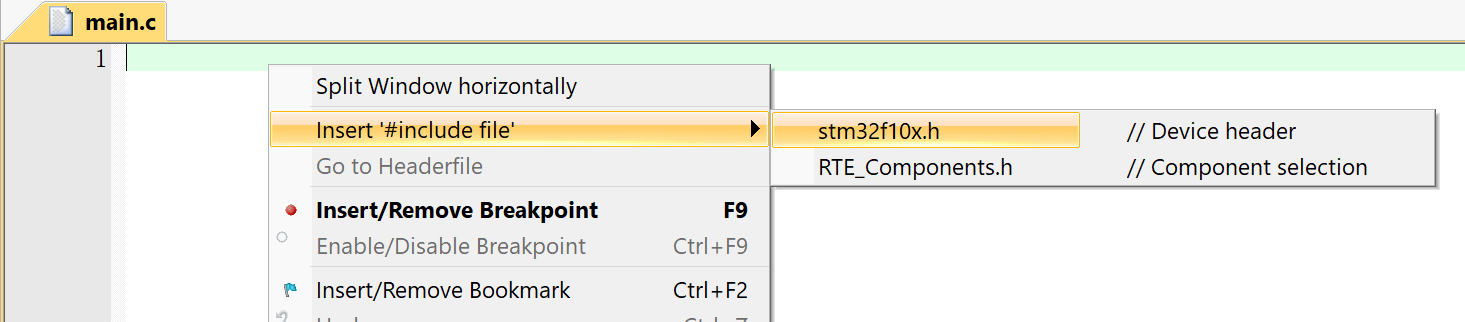
3. 编写main.c,插入头文件
在这个main.c里,我们先右键,插入头文件,选择stm32f10x.h。
图:在main.c中插入头文件
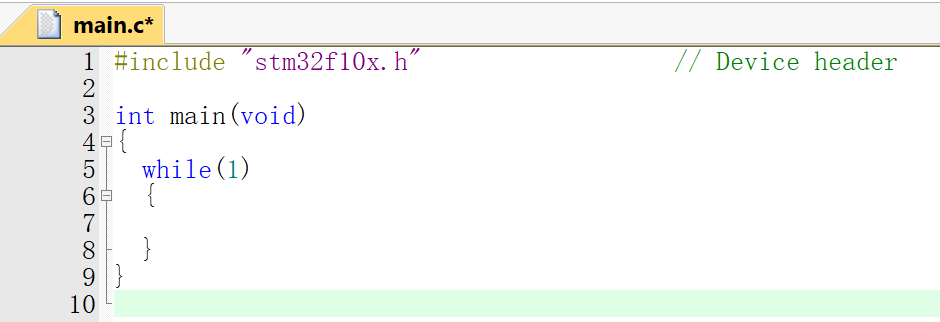
然后写一个main函数。 按Tab键可以进行缩进,里面写一个while(1)死循环。 这里注意main函数是一个int型返回值,void参数的函数。还有文件的最后一 行必须要是空行,要不然会报警告。
图:在main.c中编写代码
四、编译工程
然后我们点击这个按钮,编译并建立工程。
图:编译
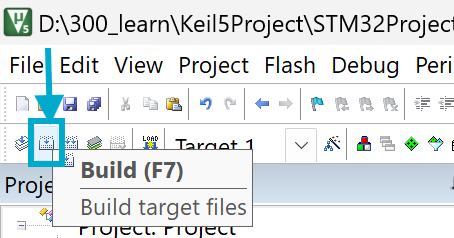
图:编译结果 显示1警告 0错误
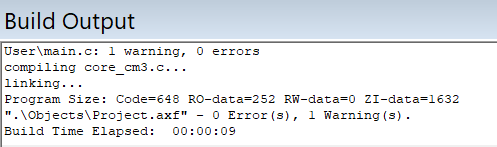
为什么这里会显示1警告呢?
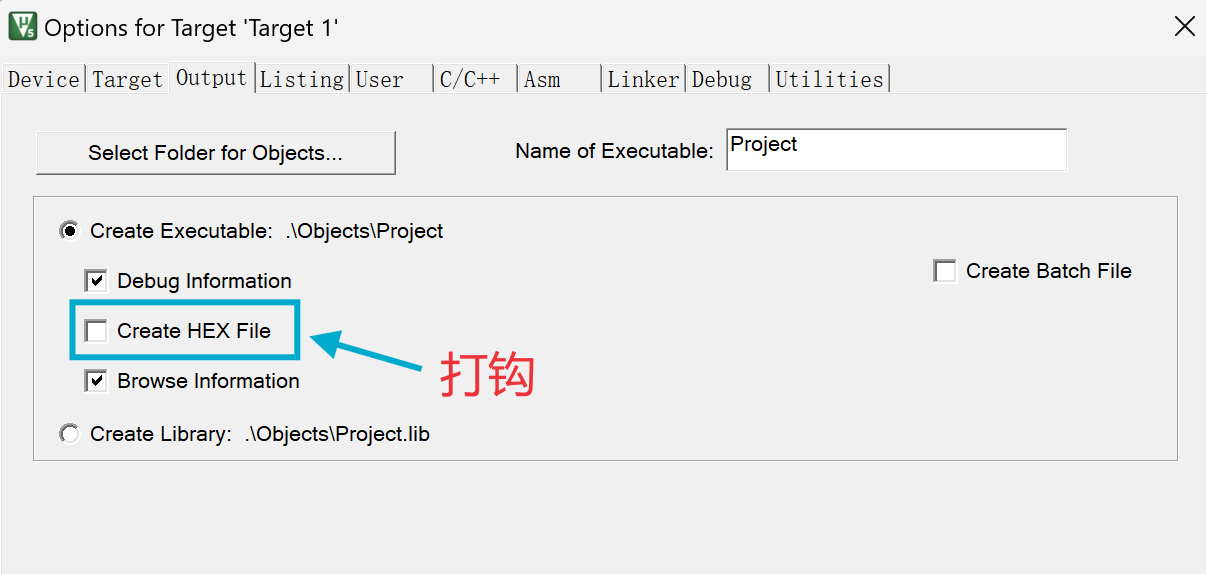
点击“魔法棒”,点击“output”,将“Create HEX File”勾选上。
这样就不会出现警告了。
可以看到下面提示的是零错误,零警告,那这就说明我们建立的工程是没问题的。
这个工程目前还没有添加STM32的库函数,所以它还是一个基于寄存器开发的工程。如果你想用寄存器开发STM32,那工程建到这里就可以了。
五、编程前期准备
接下来我给大家演示一下如何通过配置寄存器来完成点灯的操作。当然直接操作寄存器的方式不是我们本课程的重点,大家了解一下即可。
1. 调大字体
那我们先把这个界面的字体调大点,现在的字体太小,看着不舒服。
我们可以点击这个扳手工具。
图:点击这个扳手工具

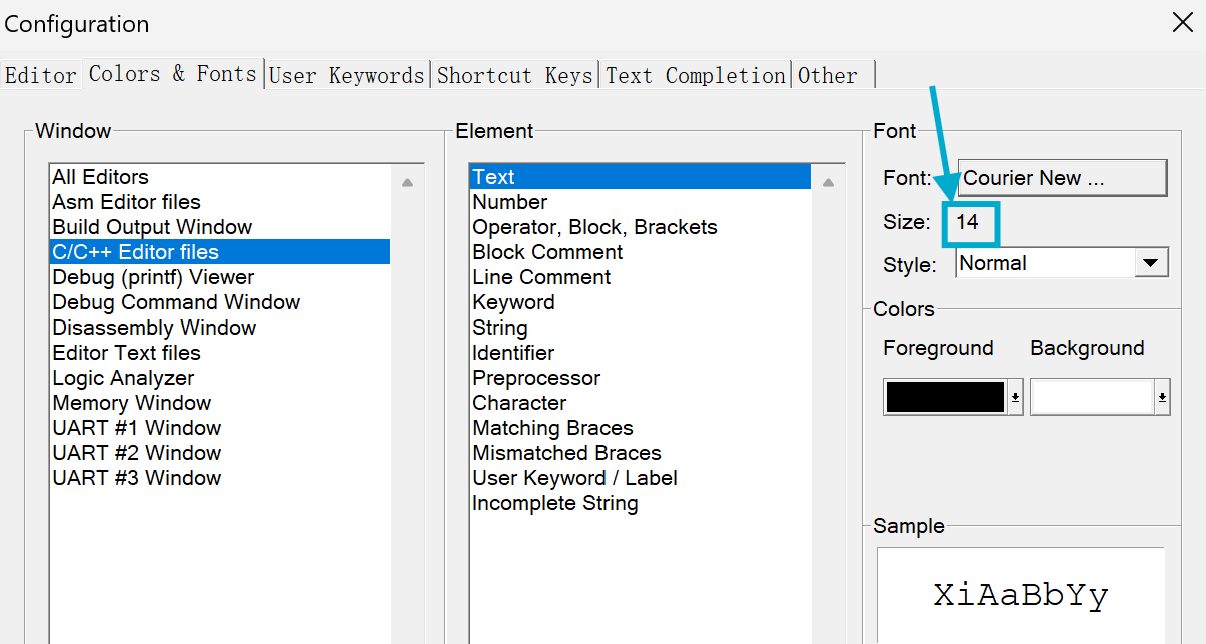
选择颜色和字体,选择C/C++编辑器的选项。然后点击这个按钮把字号调成14。
图:将C/C++编辑器的 Text 字体调整为Size:14
这个Asm编辑器的字体,我们也把它调成14号了,然后OK,这样字体就变大了。
图:将Asm编辑器的 Default 字体调整为Size:14
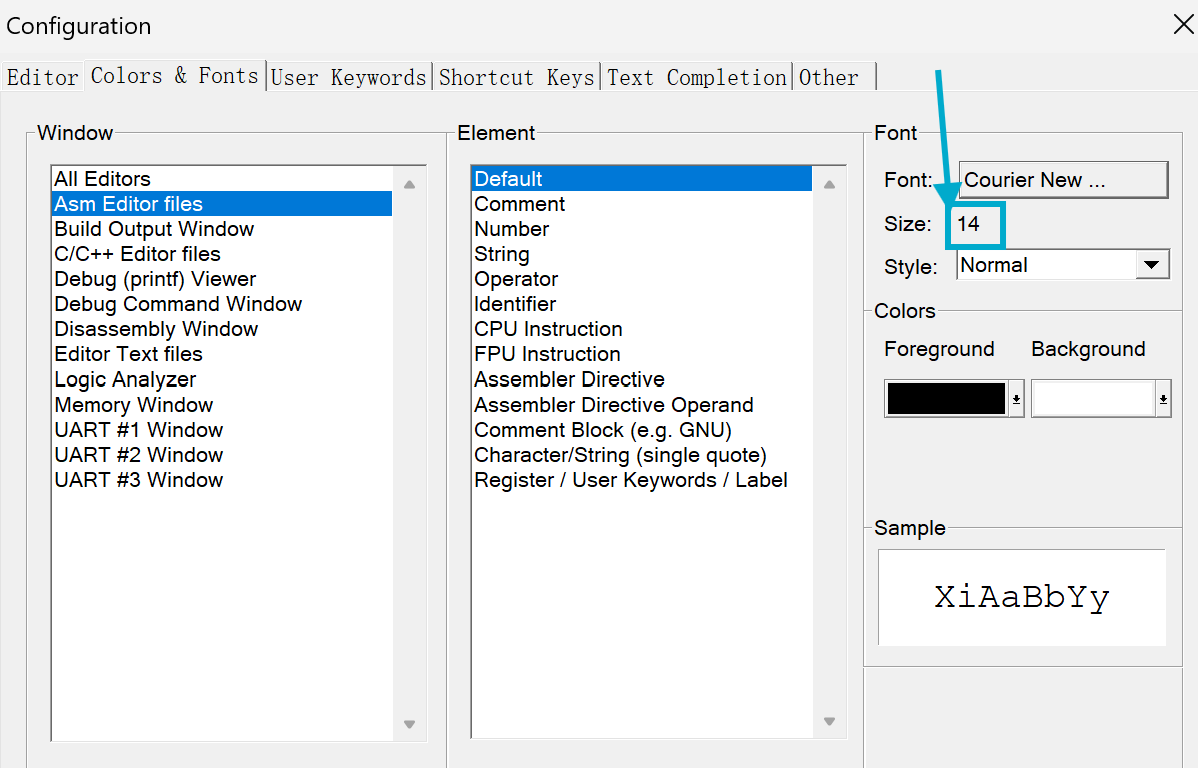
图:调大字体后的效果
2. 设置编码格式
另外我们再点一下这个扳手工具,把这个编码格式选成UTF8这一项,这样可以防止一些中文乱码的问题。
图:设置编码格式为UTF8
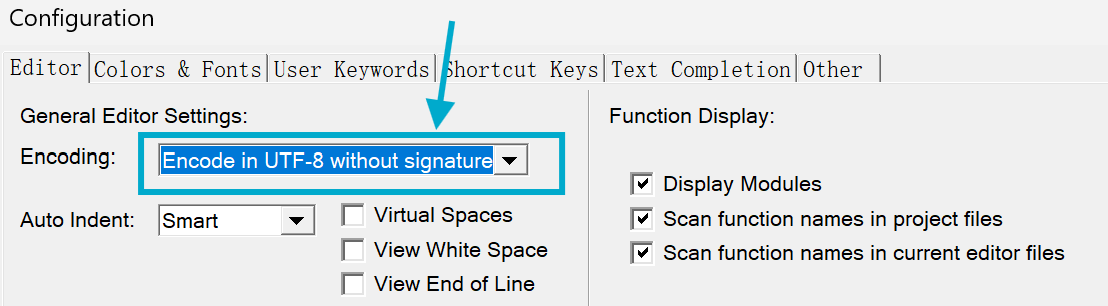
当然你要打开我的工程,也要把编码格式选为UTF8,否则中文显示就会出现问题。
如果你打开别人的工程,看到中文是乱码的话,可能还需要再改一下这个编码格式。
3. 设置Tab键的size
下面这个Tab键的大小,选择4,这个缩进大小我比较习惯,然后点击ok,这样界面看起来就舒服一些。
图:设置Tab size为4

图:设置Tab size为4后的效果
4. 将STM32最小系统板通过STLINK连接电脑
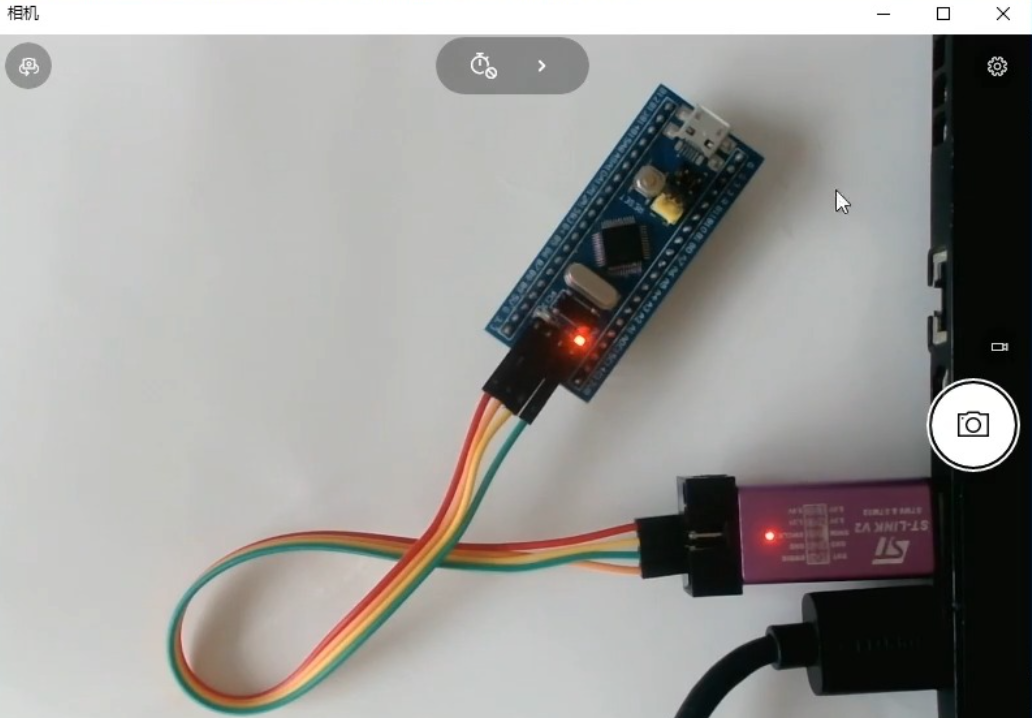
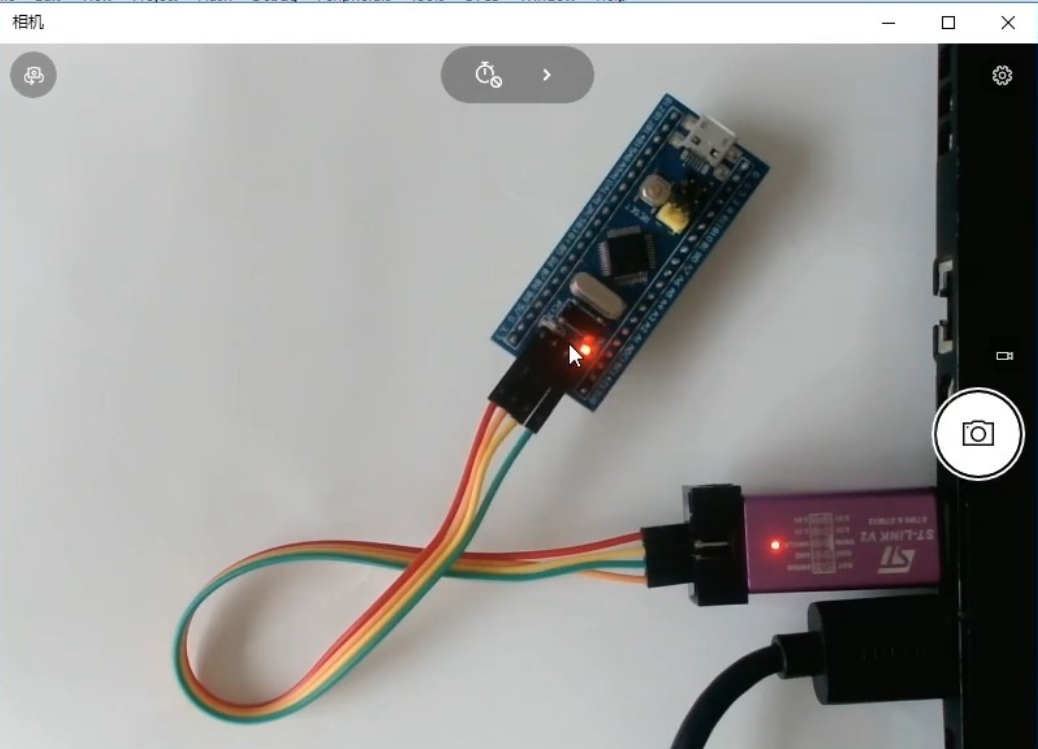
接着我们需要拿出STM32的最小系统板,STLINK和4根母对母的杜邦线,按照插针边上的标识,把3.3V、SWDIO、SWCLK、GND对应连接好,插好之后就是这个样子的。
图:将STM32的最小系统板连线
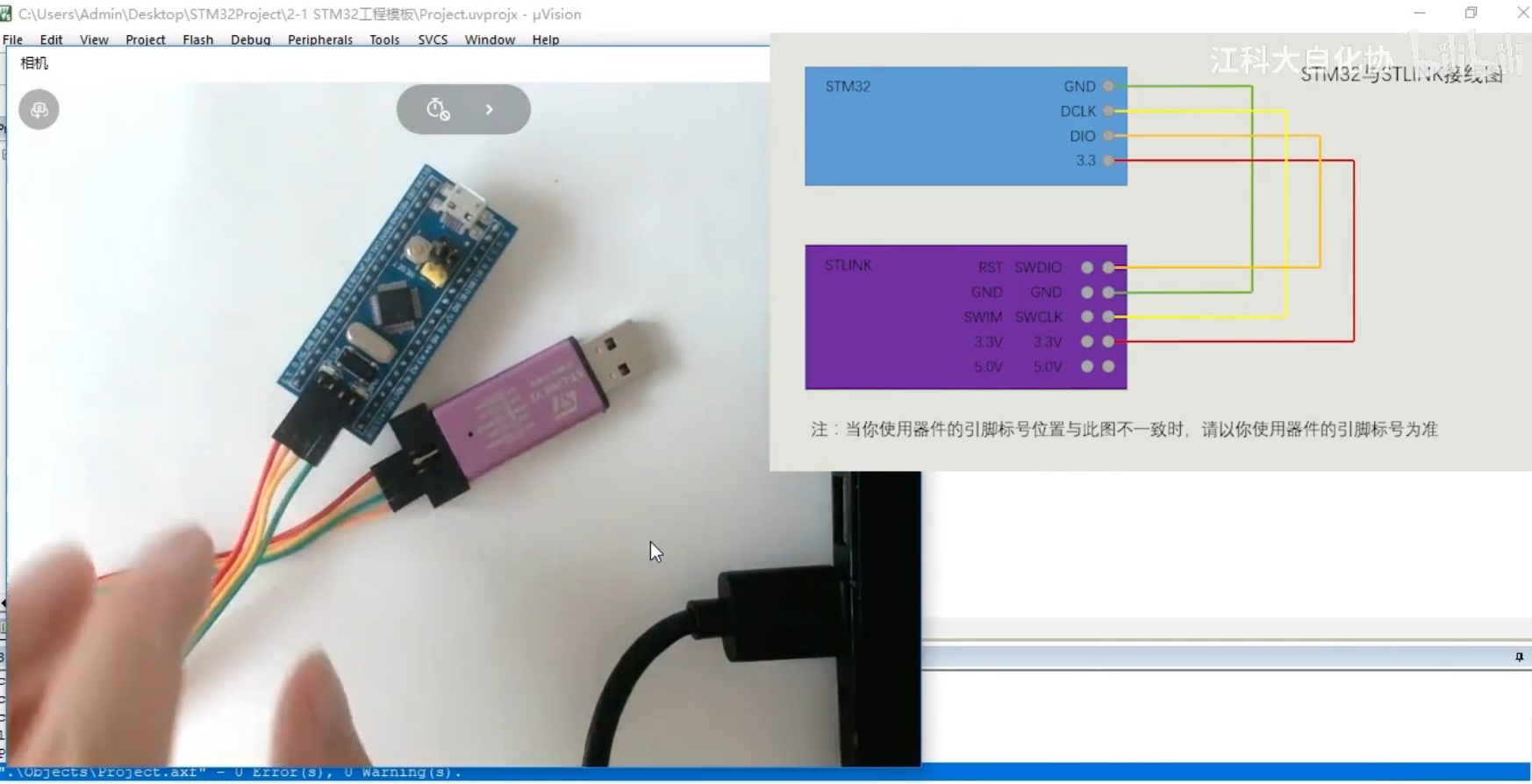
然后把STLINK插在电脑上。插上电之后,这个板子上的电源灯应该会常亮,另一个连接在PC13口上的灯默认应该是闪烁状态,这是芯片里的一个测试程序。
图:把STLINK插在电脑上

5. 在Keil里面配置STLINK的调试器
然后我们再在Keil里面配置一下调试器,点击魔术棒按钮,选择Debug。这个调试器默认是ULINK,我们用的是STLINK,所以选择ST-Link Debugger。
图:在Keil中选择调试器为ST-Link Debugger
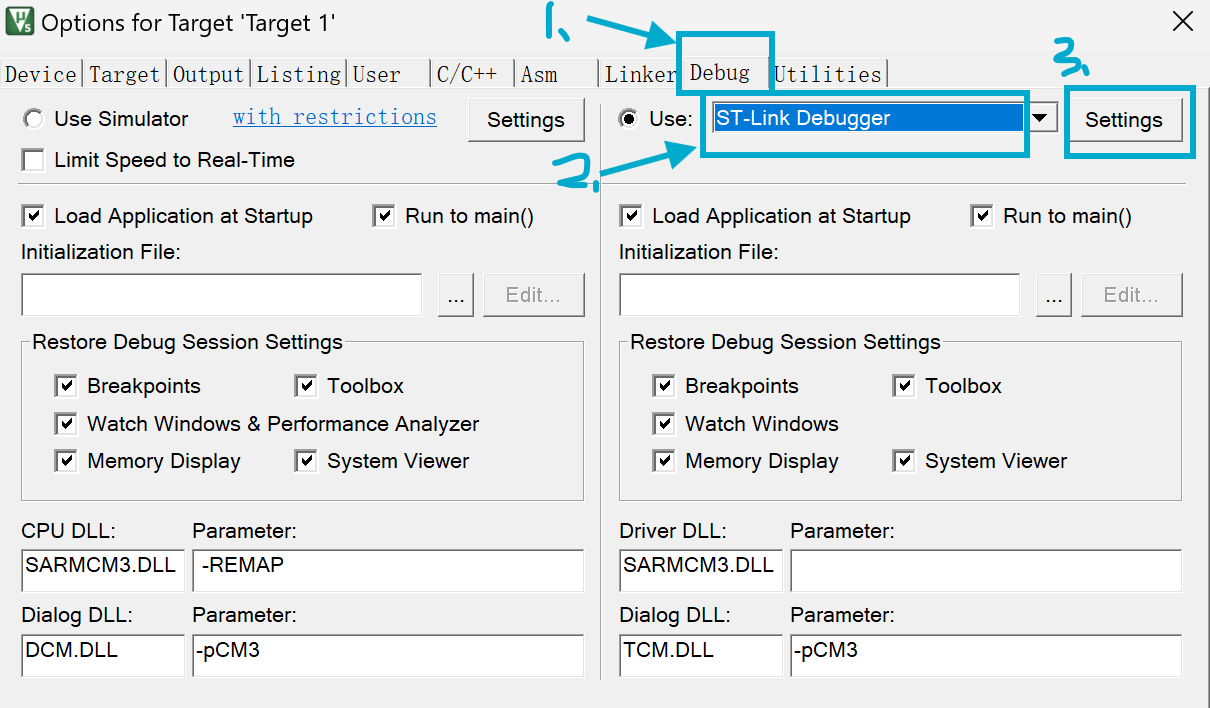
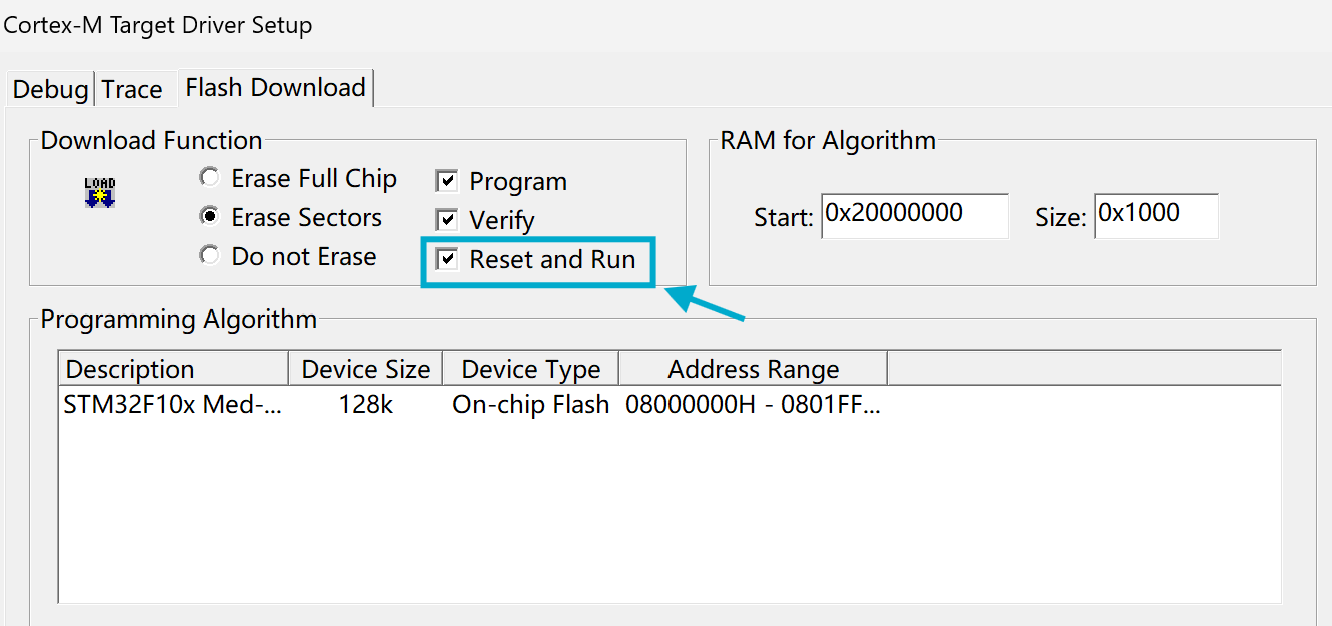
然后再点击右边的设置按钮,在Flash下载这一项,把这个Reset and Run这一项勾上,勾上这一项之后,我们下载程序后会立马复位并执行,这样方便一些。
否则每次下载之后,还需要按一下板子上的复位按键才能执行程序。那配置好调试器之后,点击确认,ok。
图:勾选Reset and Run这一项
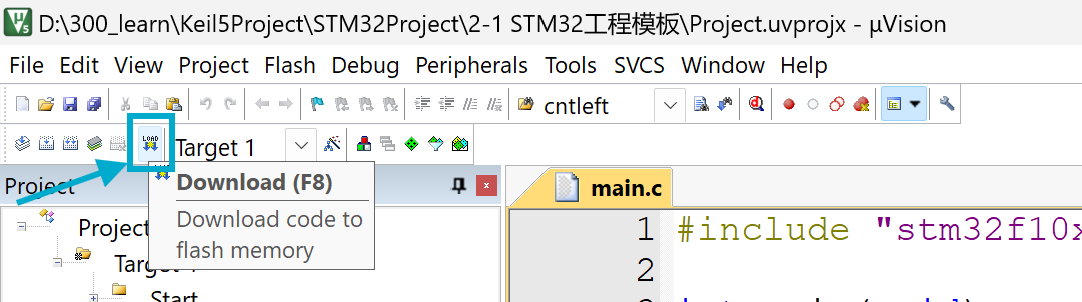
然后重新编译一下没有错误,再点击这个LOAD按钮,如果一切正常的话,这个程序就会下载到STM32里面了。
图:下载程序到开发板
我们看一下板子,可以看到这个灯已经不闪了,因为我们目前的程序啥都没有。
图:下载程序到开发板后,灯不闪了
六、寄存器编程实现点灯
那接下来,我们就配置一下寄存器,来点亮这个灯。我们只需要配置3个寄存器就可以点灯了,我们可以打开STM32的参考手册。
手册为:《STM32F10xxx参考手册(中文)》
1. 使能GPIOC的时钟
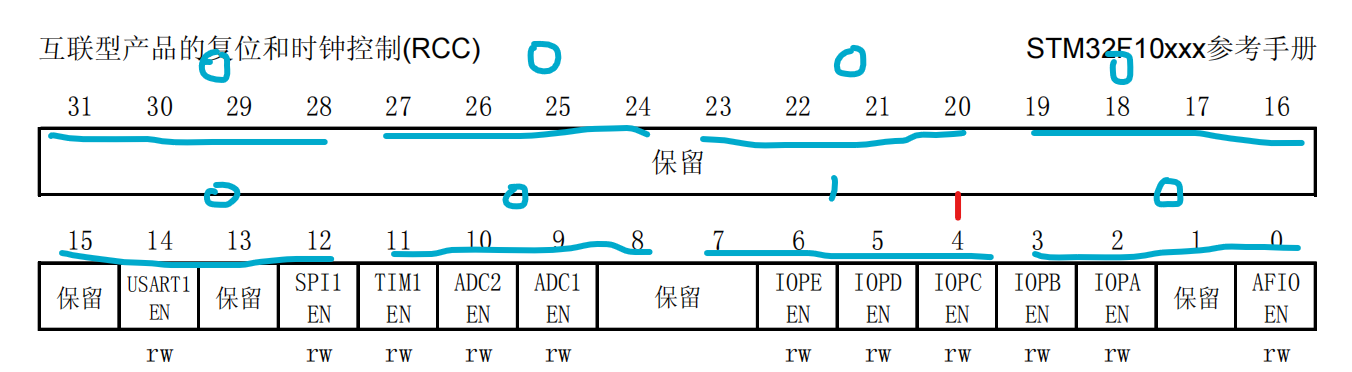
首先是RCC的一个寄存器,来使能GPIOC的时钟。GPIO都是APB2的外设,所以在这个APB2外设时钟使能寄存器RCC_APB2ENR里面配置。
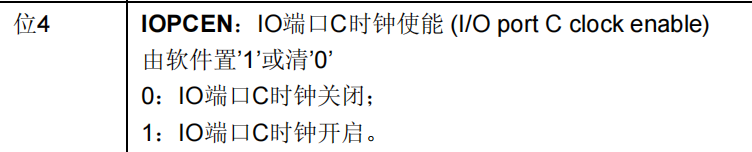
可以看到,这里有个IOPCEN,这一位就是使能GPIOC的时钟的。下面的解释是,这一位写1,就是打开GPIOC的时钟,那这一位写1,其他的无关项我们先都给0。
图:APB2外设时钟使能寄存器 位4 IOPCEN
图:APB2外设时钟使能寄存器 位4 IOPCEN 解释
那整个寄存器的2进制数据换成16进制,就是4个一分组,也就是00000010。
图:寄存器的2进制数据换成16进制,就是4个一分组:0 0 0 0 0 0 1 0
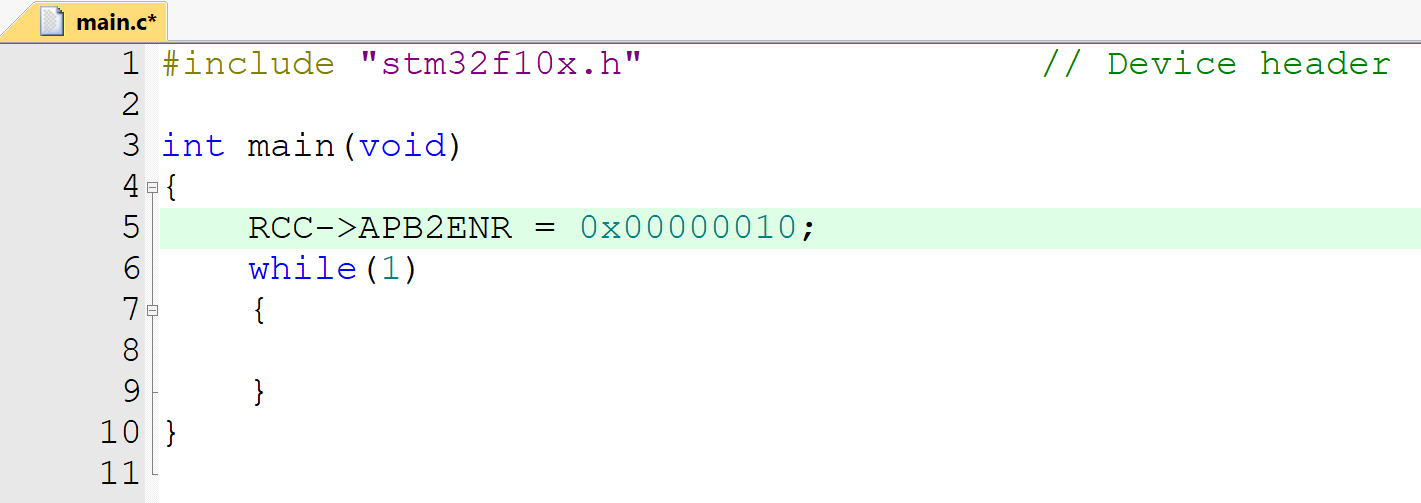
然后我们回到Keil,在while死循环之前,写上RCC的APB2ENR寄存器=0x00000010,这样就可以打开GPIOC的时钟了。
图:寄存器编程打开GPIOC的时钟
2. 配置PC13口的模式
然后第二个寄存器,我们需要配置一下PC13口的模式。
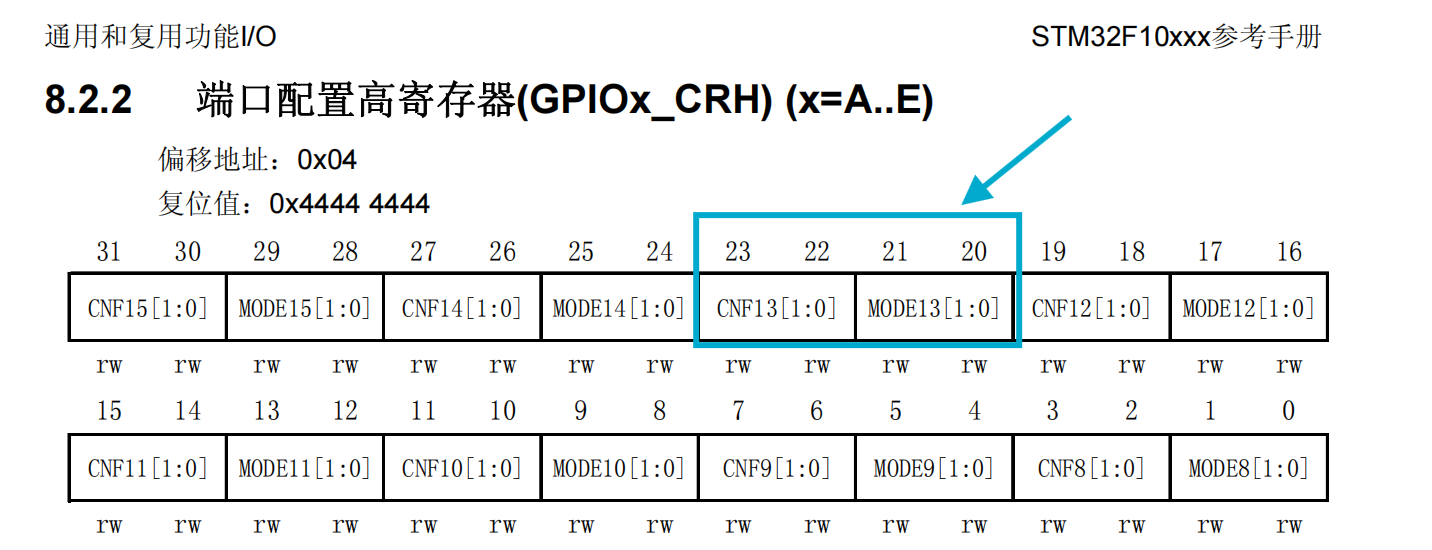
我们可以找到端口配置高寄存器,寄存器GPIOLx_CRH,这个x可以是A到E的任意一个字母。
然后右边的CNF13和MODE13就是用来配置13号口的。
图:端口配置高寄存器GPIOLx_CRH,CNF13和MODE13用来配置13号口
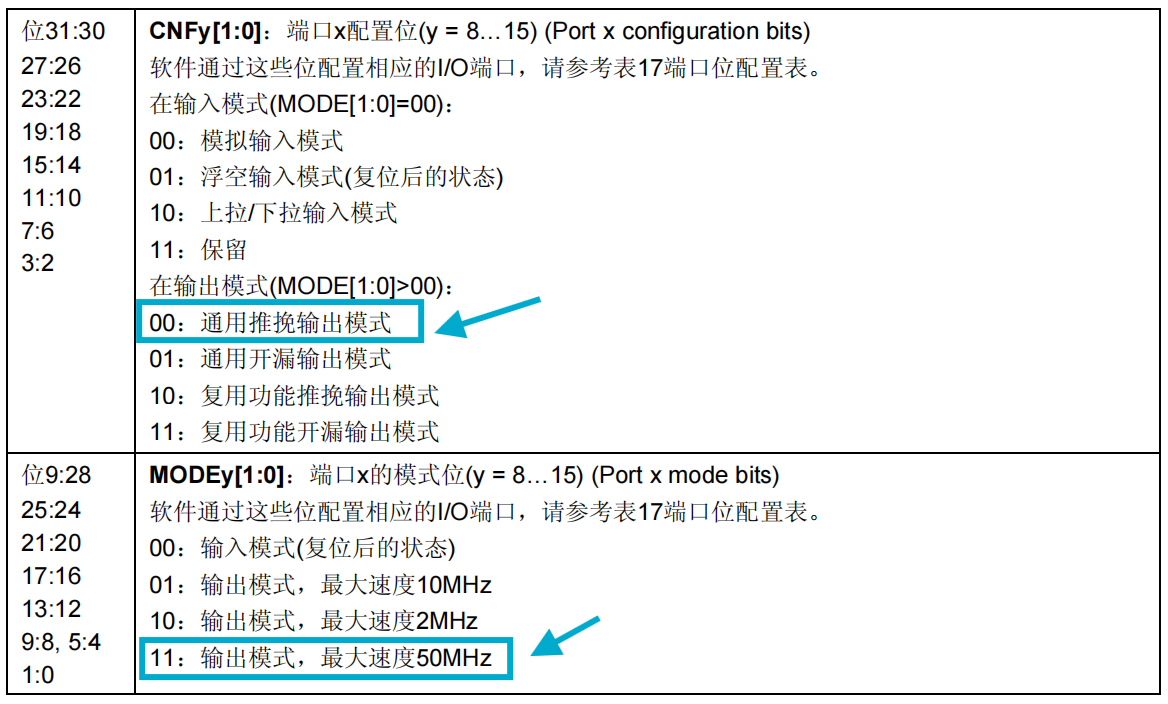
下面的说明我们看一下,这个CNF我们需要配置为通用推挽输出模式,也就是这两位为00。MODE要配置为输出模式,最大速度可以给50MHz,也就是这两位为11。
图:CNF为00 MODE为11
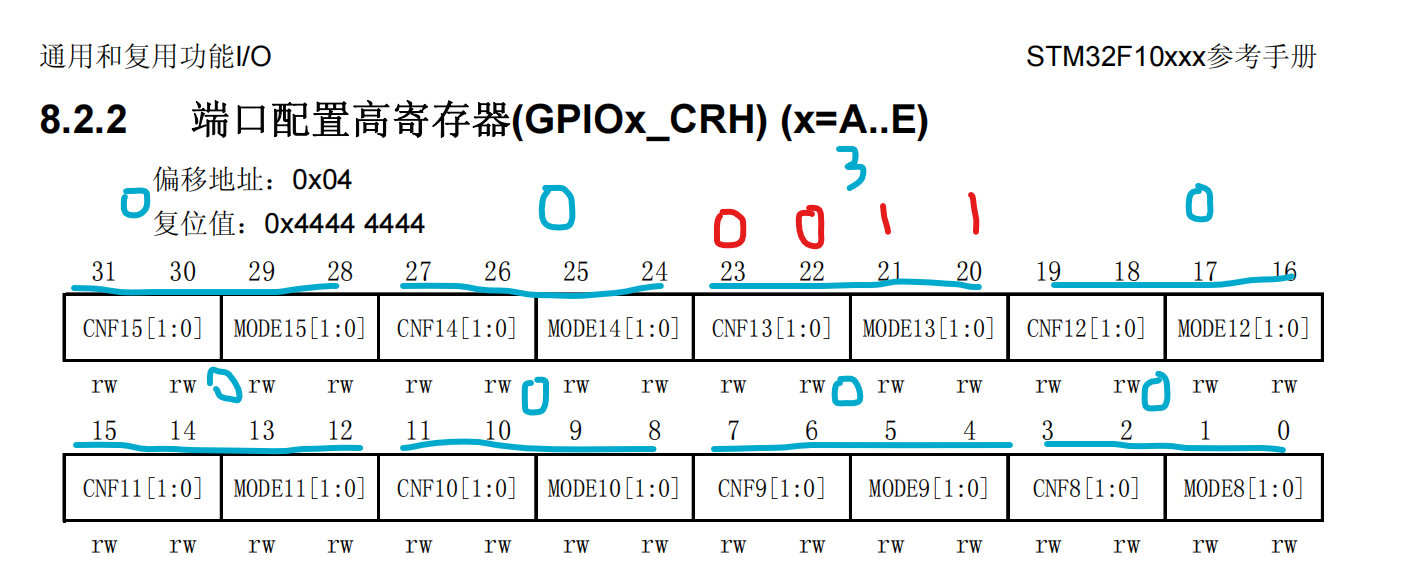
最后我们对照上面的寄存器,这四位为0011,其他的我们也都给它配置为0。这样整个寄存器的值换算成16进制就是0 0 3 0 0 0 0 0。
图:整个寄存器的值换算成16进制就是0 0 3 0 0 0 0 0
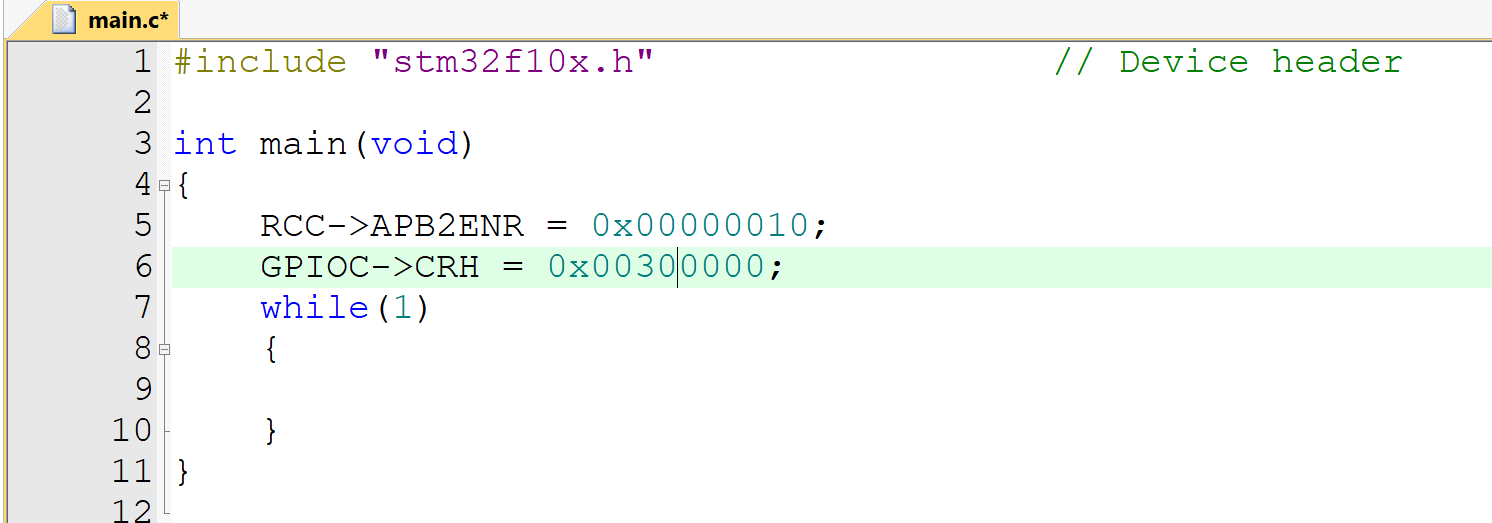
然后我们回到Keil,在这里写上GPIOC的CRH=0x00300000。
图:寄存器编程配置PC13口的模式
3. 给PC13口输出数据
接下来我们就可以给PC13口输出数据了。我们可以看到这个端口输出数据寄存器GPIOx_ODR中间有一位ODR13,这一位写1,13号口就是高电平,写0就是低电平。
图:端口输出数据寄存器GPIOx_ODR
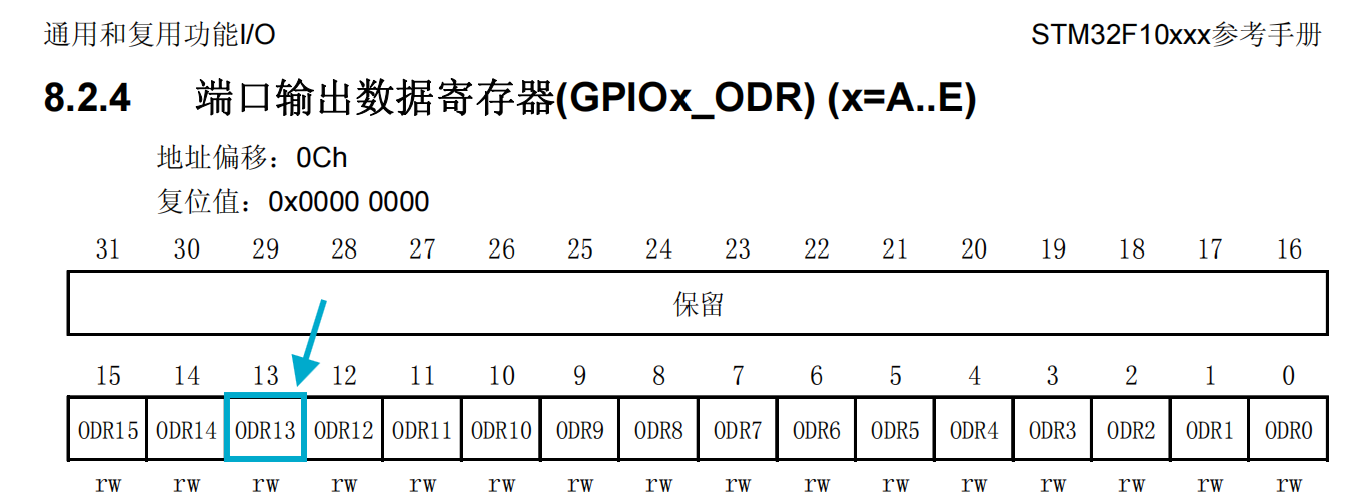
如果写1的话,ODR的值就是00002000。
在这里我们写上GPIOC的ODR=0x00002000。
因为这个灯是低电平点亮的,所以我们给ODR全为0,就是亮。给ODR 0x00002000就是灭。
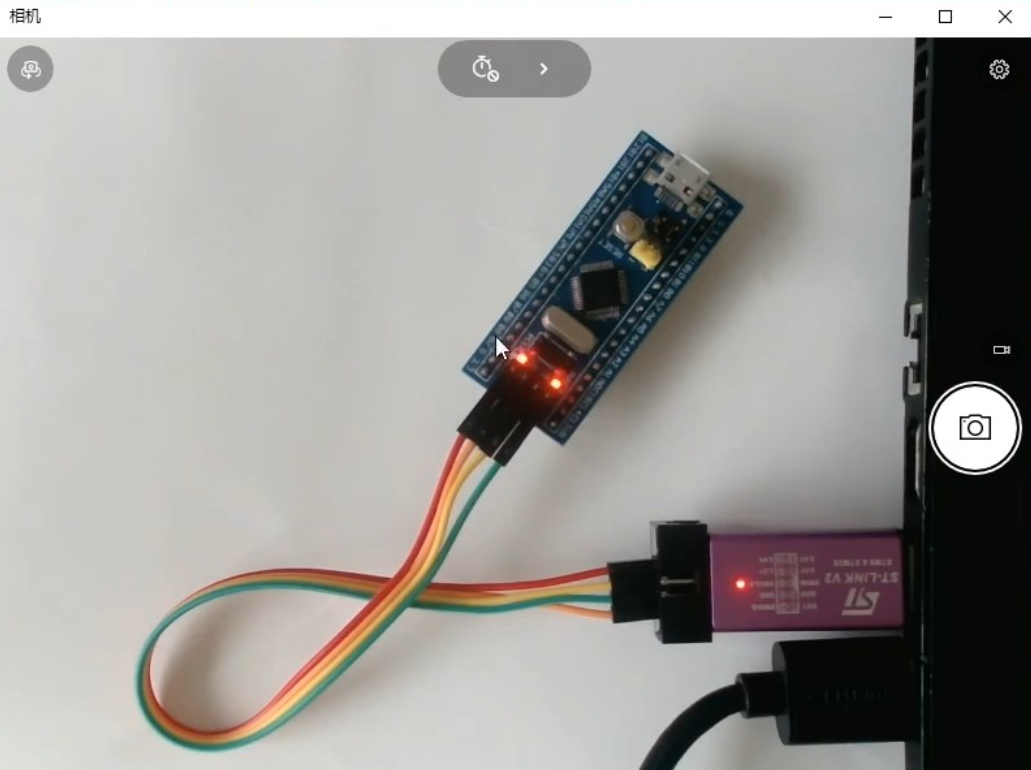
那我们试一下,先给ODR全0,编译,下载。这时可以看到这个PC13的灯已经亮起来了。
图:给GPIOC->ODR 全0
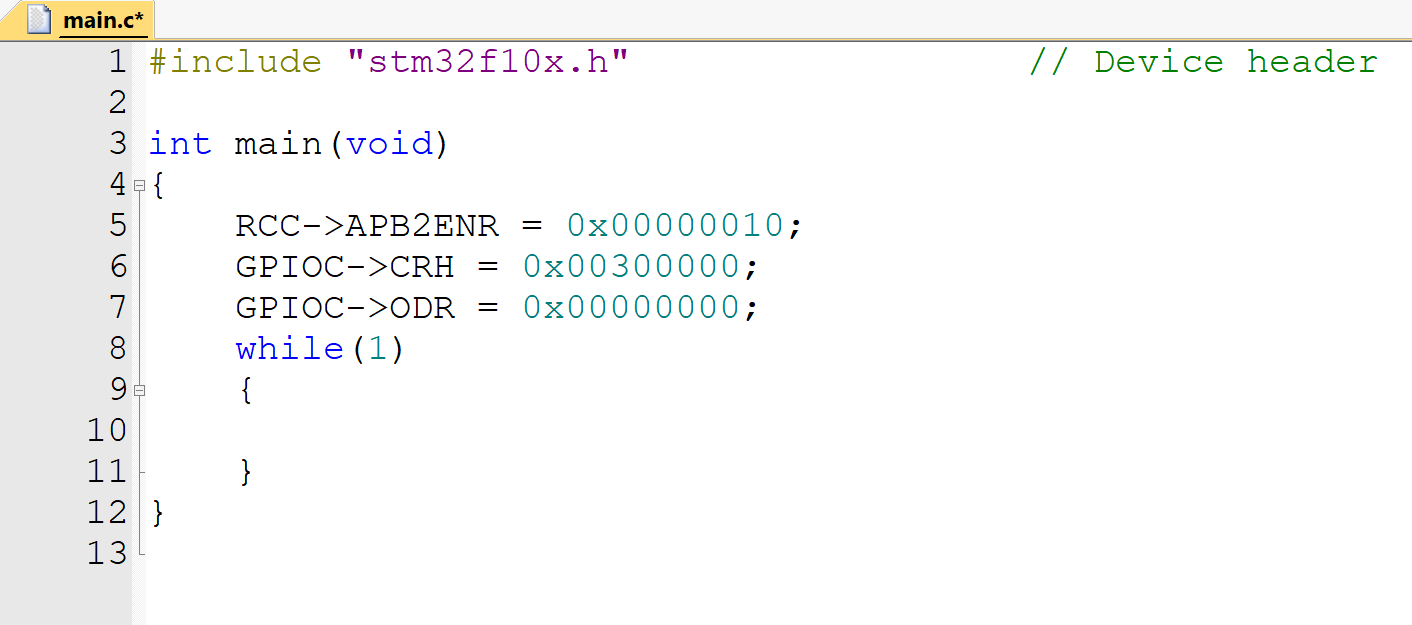
图:给GPIOC->ODR 全0 PC13灯亮
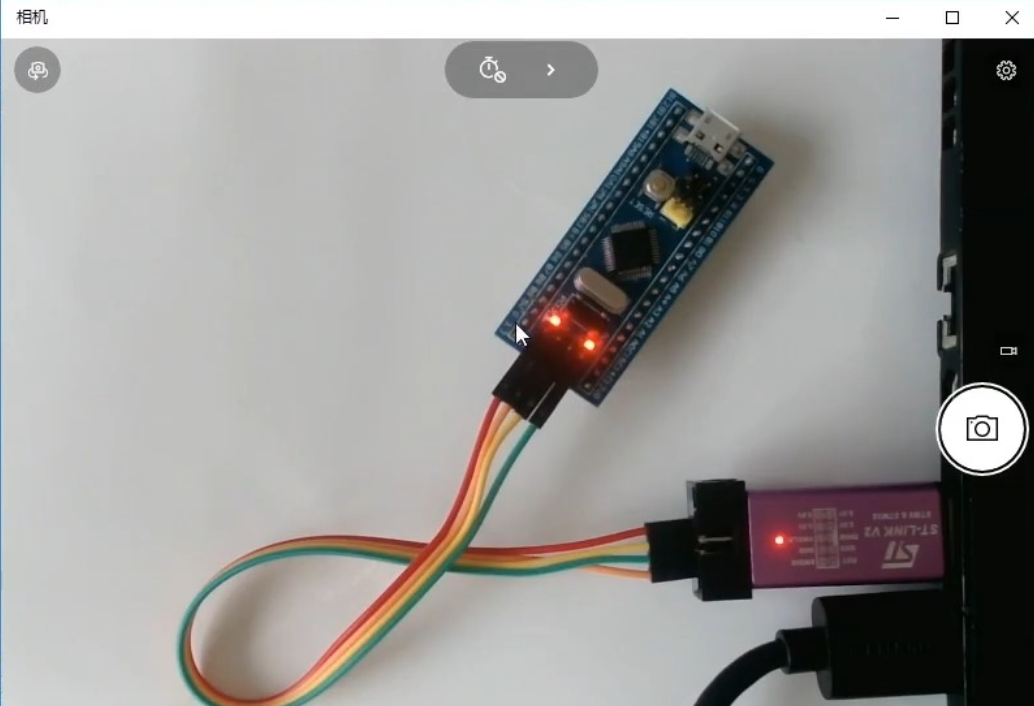
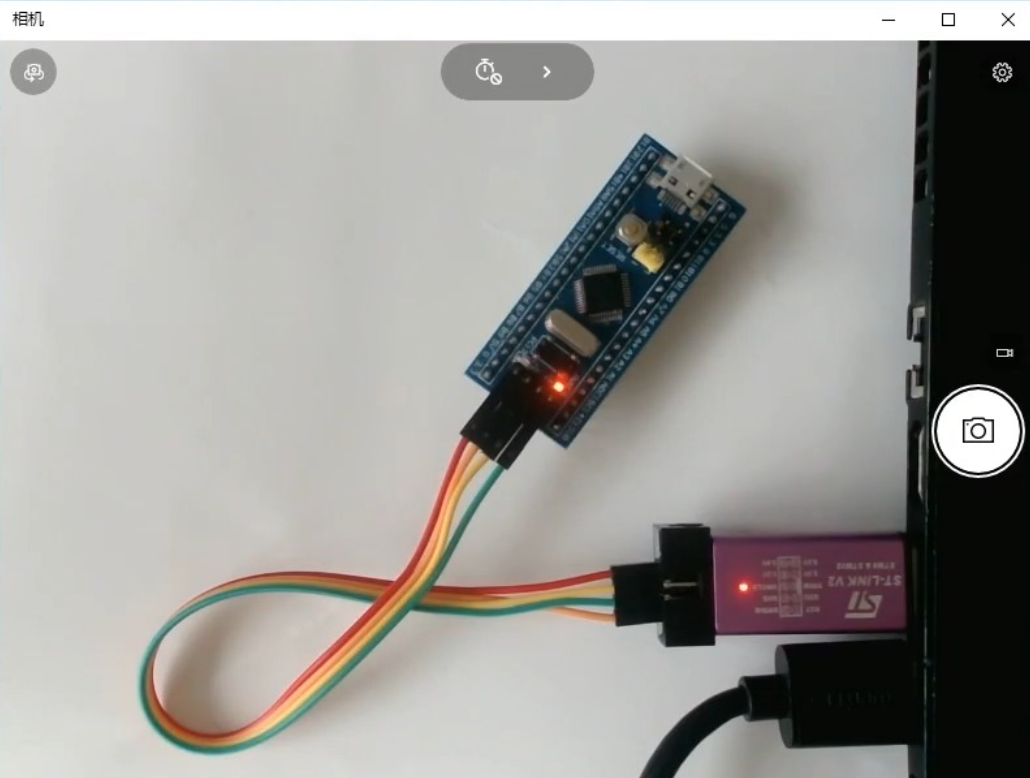
如果我们给ODR 2000的话,编译,下载。此时灯就灭了。
图:给GPIOC->ODR 2000
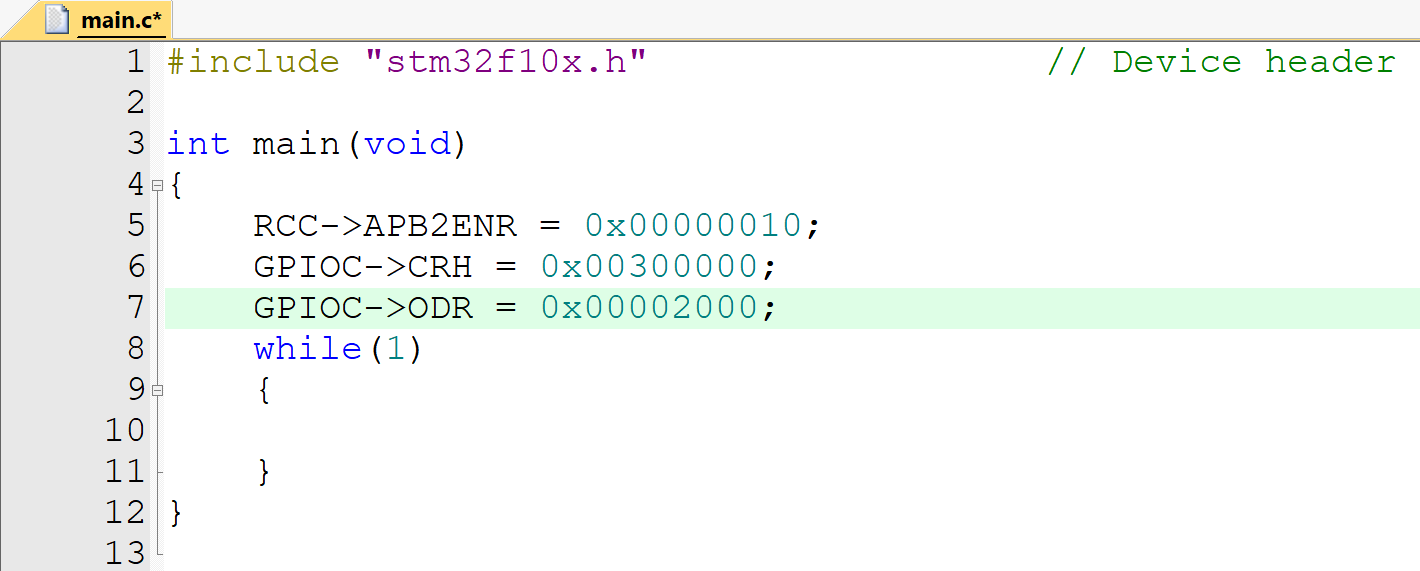
图:给GPIOC->ODR 2000 PC13灯灭
这就是配置寄存器的方式进行点灯的操作。可以看出来,这种方式需要不断地查手册来了解每个寄存器的每一位都是干啥的。
而且这个操作方式也有个弊端,就是我们把除了PC13之外的位都配置成了0,这样会影响到其他端口的原有配置,如果要做到只配置PC13而不影响其他位,那还需要&=和|=的操作,这个在51单片机的视频里我们也经常遇到。
那这样配置就会更加麻烦。所以这种寄存器的操作方式,虽然代码简洁,但是还是不太方便。
七、库函数编程实现点灯
那接下来我们就要为这个工程添加库函数了,看看库函数数和寄存器的操作方式有哪些区别。
1. 在工程文件夹新建Library文件夹用来存放库函数
我们打开工程文件夹,在这里新建一个文件夹叫Library,用来存放库函数。
图:D:\Keil5Project\STM32Project\2-1 STM32工程模板
接着打开固件库的文件夹,打开Libraries,STM32标准外设驱动,src,这些就是库函数的源文件。
图:库函数的源文件 D:\江科大 STM32\固件库\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\STM32F10x_StdPeriph_Driver\src
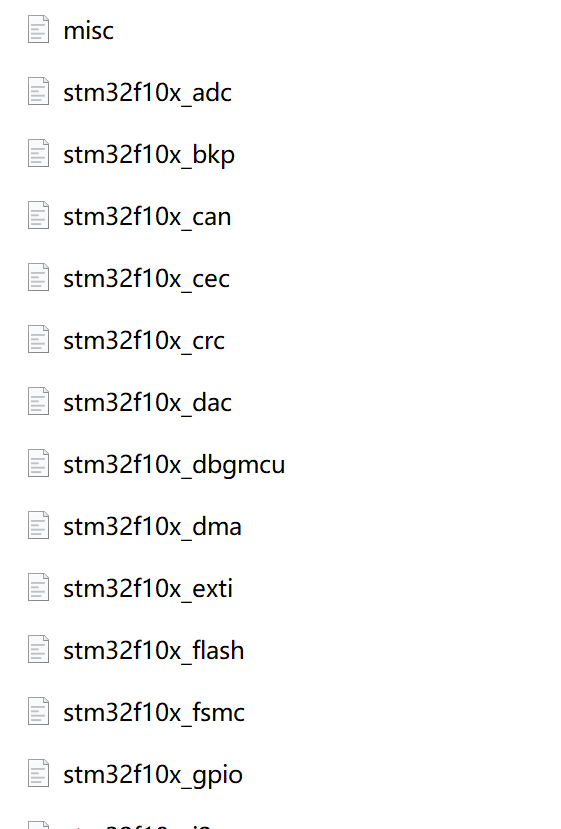
这个misc是内核的库函数,其他的就是内核外的外设库函数了。这个misc就是混杂的意思,看来这个ST公司还是不厚道,把内核的库函数都发配到杂项里面去。开个玩笑。
那我们按Ctrl+A全选,然后复制,在Library文件夹下粘贴。
然后再打开固件库的inc文件夹,这些是库函数的头文件。我们继续Ctrl+A全选,然后复制,在Library文件夹下粘贴。
图:加入库函数文件的Library文件夹 D:\Keil5Project\STM32Project\2-1 STM32工程模板\Library
2. Keil工程中新建组Library并导入库函数文件
接着回到Keil软件,同样在Target处右键,然后添加组,改个名字叫Library。再右键添加已经存在的文件,把Library文件夹下所有文件加进来。
图:Keil工程中新建组Library
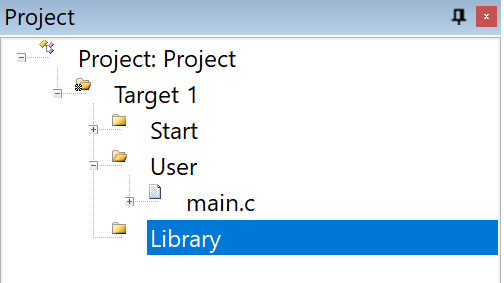
图:Keil工程中Library导入库函数文件
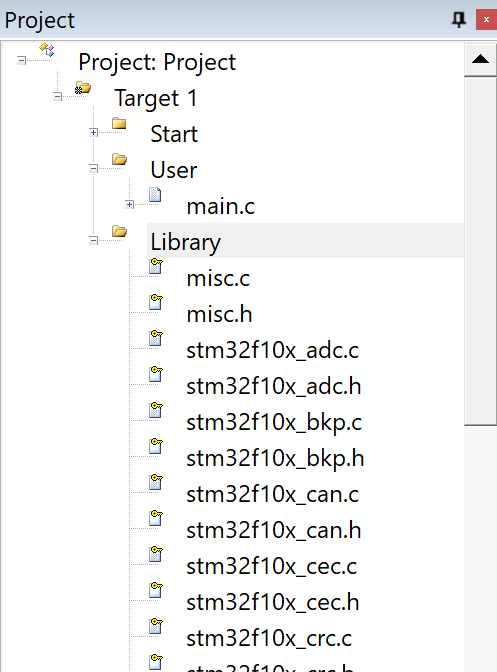
这样就把所有的库函数文件都添加进来了。但是对于这个库函数来说,现在还不能直接使用,我们需要再添加一个文件。
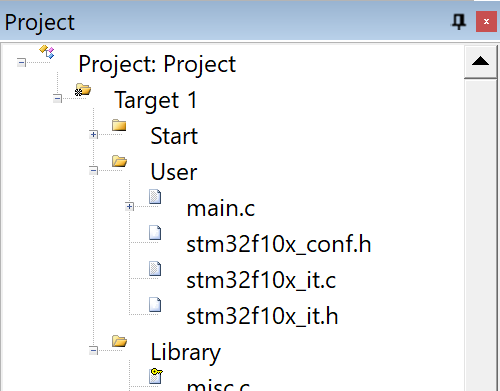
我们打开固件库文件夹,打开Project,STM32Template,可以看到stm32f10x_conf.h和两个it结尾的文件。
图:stm32f10x_conf.h和两个it结尾的文件 D:\江科大 STM32\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Template
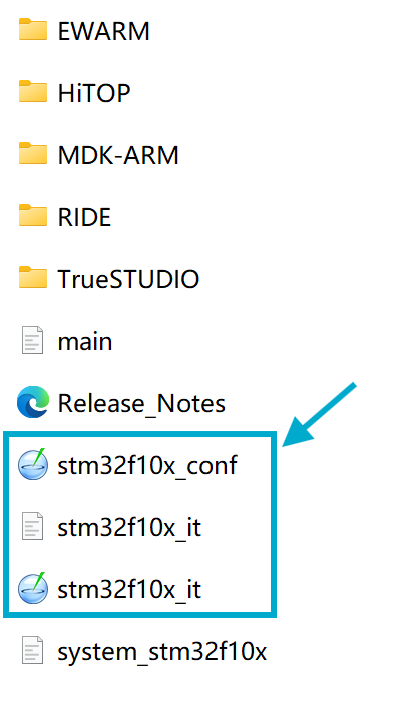
这个conf(configuration)文件是用来配置库函数头文件的包含关系的。另外这里面还有一个用来参数检查的函数定义,这是所有库函数都需要的.
两个it(interrupt)文件是用来存放中断函数的。我们把这三个文件复制下来,然后粘贴到工程的User目录下。
图:将三个文件粘贴到工程的User目录下 D:\Keil5Project\STM32Project\2-1 STM32工程模板\User
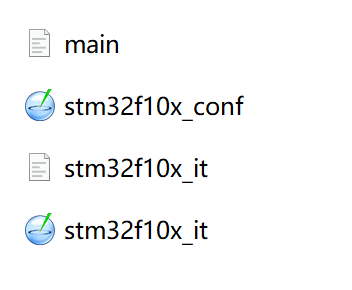
接着回到Keil软件,在User组里把刚才那三个文件添加进来。
图:Keil工程中在User组里把刚才那三个文件添加进来
3. Keil工程中设置宏定义以及头文件路径
最后还需要一个宏定义,我们可以在这个头文件右键,打开文件。
图:进入头文件
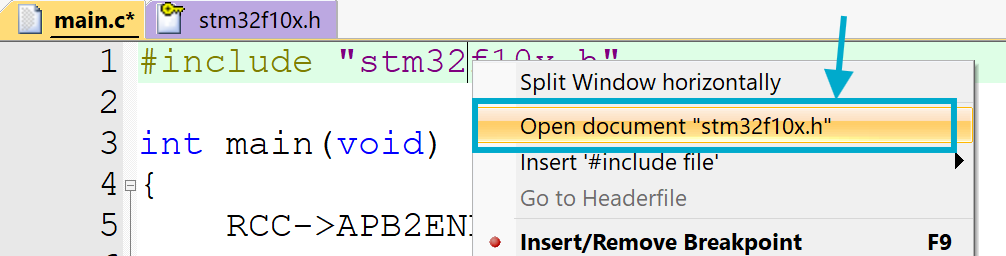
然后滑到最下面。
图:stm32f10x.h中的 一个条件编译

看到这个语句,这是一个条件编译,意思是如果你定义了使用标准外设驱动USE_STDPERIPH_DRIVER这个字符串,下面这个include conf.h语句才有效。
所以我们还需要复制一下这个字符串,然后打开工程选项,在C/C++的Define栏目粘贴这个字符串,这样才能包含标准外设库,也就是库函数。
当然还有下面的头文件路径,也不要忘了把这个User和Library目录的路径也都添加上。
图:设置工程宏定义,设置头文件路径
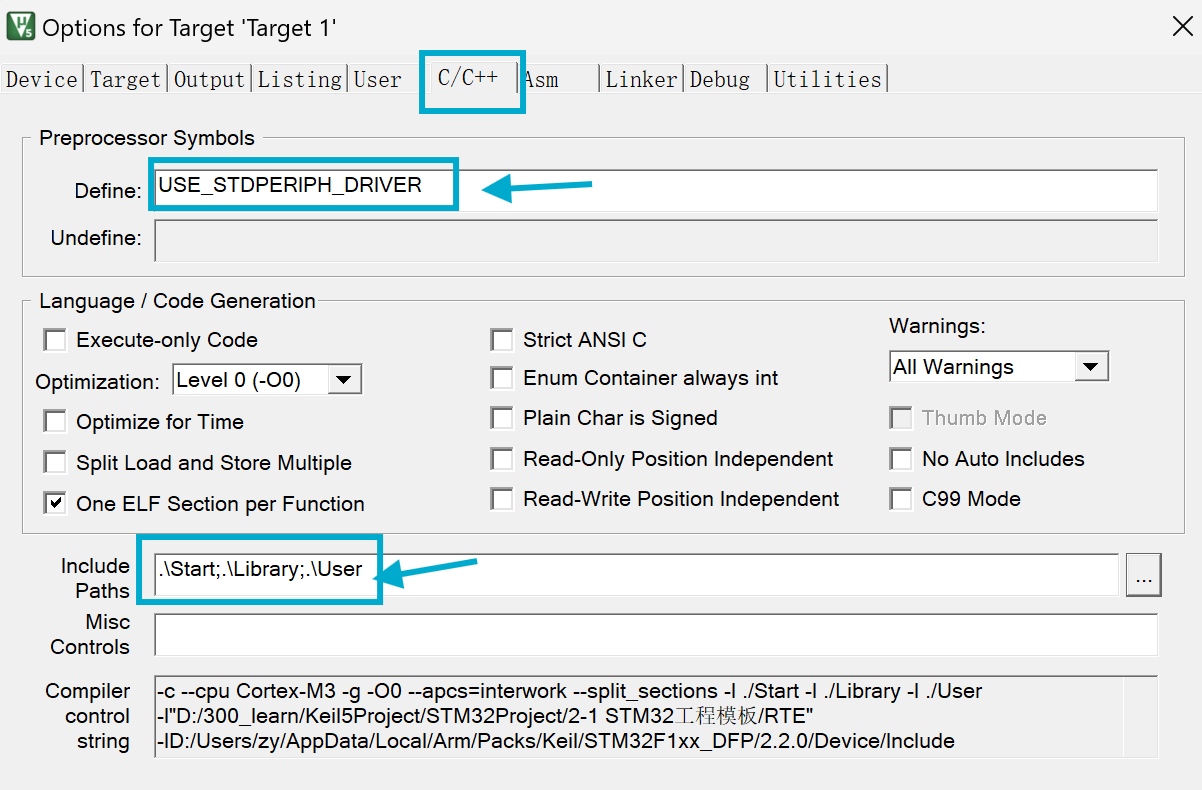
然后OK,这样我们基于库函数的工程就建好了。
我们可以看一下这个Library里面的库函数也都带了钥匙,不需要我们更改。我们唯一需要更改的就是User组里面的这些文件。
4. 整理工程目录
我们点一下这个三个箱子的按钮,把这个Library往上挪下,把这些不用改的都放到最上面,这样看着舒服一下。
图:三个箱子 按钮
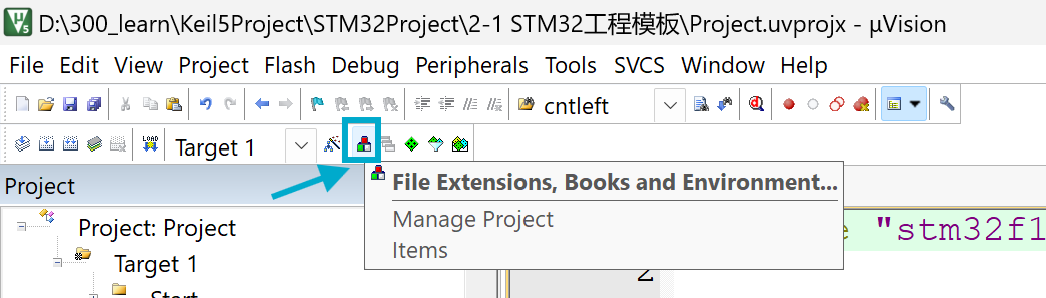
图:把Library移上去
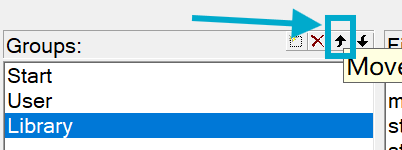
图:把Library移上去的效果

那我们编译看一下。这个第一次编译会比较慢,以后就快一些。
可以看到是0错误,0警告,这说明我们的工程建立是成功的。
然后我们再用库函数来实现点灯的操作。我们先把这三句删了,库函数其实也是间接的配置寄存器,所以它们的步骤也是一样的。
5. 使用RCC_APB2外设时钟控制函数 RCC_APB2PeriphClockCmd()来开启时钟
首先是使能时钟,那库函数就有这样一个函数来开启时钟,叫RCC_APB2外设时钟控制 RCC_APB2PeriphClockCmd()。然后这里提示有两个参数,第一个是选择外设,第二个是选择新的状态。
图:RCC_APB2外设时钟控制函数 RCC_APB2PeriphClockCmd()

我们可以右键跳到函数定义 Go To Definition of ,这上面有函数的简介和参数说明。简介说这个函数是用来使能或者失能APB2的外设时钟。
第一个参数可以是下面这些值。那我们可以找到APB2外设GPIOC这一项,然后复制,直接作为第一个参数即可。
然后我们再回过去看第二个参数,NewState的值可以是ENABLE或者DISABLE。那我们复制ENABLE,放在第二个参数的位置。
最后别忘了括号和分号,这样GPIOC的外设时钟就配置好了。
图:在main.c中,使用库函数配置GPIOC的外设时钟
我们可以看一下这个函数,它的内部其实还是配置RCC_APB2ENR这个寄存器。但是经过函数的包装,我们不需要再去查手册,来确认哪一位是干啥的了。
函数定义:RCC_APB2PeriphClockCmd()
/**
* @brief Enables or disables the High Speed APB (APB2) peripheral clock.
* @param RCC_APB2Periph: specifies the APB2 peripheral to gates its clock.
* This parameter can be any combination of the following values:
* @arg RCC_APB2Periph_AFIO, RCC_APB2Periph_GPIOA, RCC_APB2Periph_GPIOB,
* RCC_APB2Periph_GPIOC, RCC_APB2Periph_GPIOD, RCC_APB2Periph_GPIOE,
* RCC_APB2Periph_GPIOF, RCC_APB2Periph_GPIOG, RCC_APB2Periph_ADC1,
* RCC_APB2Periph_ADC2, RCC_APB2Periph_TIM1, RCC_APB2Periph_SPI1,
* RCC_APB2Periph_TIM8, RCC_APB2Periph_USART1, RCC_APB2Periph_ADC3,
* RCC_APB2Periph_TIM15, RCC_APB2Periph_TIM16, RCC_APB2Periph_TIM17,
* RCC_APB2Periph_TIM9, RCC_APB2Periph_TIM10, RCC_APB2Periph_TIM11
* @param NewState: new state of the specified peripheral clock.
* This parameter can be: ENABLE or DISABLE.
* @retval None
*/
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
RCC->APB2ENR |= RCC_APB2Periph;
}
else
{
RCC->APB2ENR &= ~RCC_APB2Periph;
}
}
而且这里他已经帮我们用|=和&=来操作了。或者这个库函数的配置是不会影响到寄存器的其他位的,这就是库函数和寄存器的区别。
我们看到这个代码虽然比寄存器长,但是语义更加明确,也不需要我们再查表计算这个寄存器的值了。我们只需要调用库函数,按照它的提示把参数填好就行了。所以说从这点对比上来看,库函数是比寄存器有更大优势的。
好,那我们继续来配置。
6. 使用GPIO_Init()函数配置端口模式
第二步是配置端口模式,我们需要用到GPIO_Init这个函数。然后有两个参数,第一个是选择哪个GPIO,第二个是参数的结构体。
这个比上一个函数要麻烦一些,但也是一个套路,我们根据提示来配置参数即可。那我这里来操作一下,这里使用了结构体来配置参数,代码逻辑还是有些复杂的,这个我们下节还会继续讲,大家先跟着我操作就行了。
我们首先还是去到这个函数的定义,可以看到这个函数的介绍是根据GPIO_Init结构体的参数来配置GPIO。
/**
* @brief Initializes the GPIOx peripheral according to the specified
* parameters in the GPIO_InitStruct.
* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.
* @param GPIO_InitStruct: pointer to a GPIO_InitTypeDef structure that
* contains the configuration information for the specified GPIO peripheral.
* @retval None
*/
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_MODE(GPIO_InitStruct->GPIO_Mode));
assert_param(IS_GPIO_PIN(GPIO_InitStruct->GPIO_Pin));
/*---------------------------- GPIO Mode Configuration -----------------------*/
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
/* Check the parameters */
assert_param(IS_GPIO_SPEED(GPIO_InitStruct->GPIO_Speed));
/* Output mode */
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*---------------------------- GPIO CRL Configuration ------------------------*/
/* Configure the eight low port pins */
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
tmpreg = GPIOx->CRL;
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = ((uint32_t)0x01) << pinpos;
/* Get the port pins position */
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
if (currentpin == pos)
{
pos = pinpos << 2;
/* Clear the corresponding low control register bits */
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
/* Write the mode configuration in the corresponding bits */
tmpreg |= (currentmode << pos);
/* Reset the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
/* Set the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
GPIOx->CRL = tmpreg;
}
/*---------------------------- GPIO CRH Configuration ------------------------*/
/* Configure the eight high port pins */
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
tmpreg = GPIOx->CRH;
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = (((uint32_t)0x01) << (pinpos + 0x08));
/* Get the port pins position */
currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos);
if (currentpin == pos)
{
pos = pinpos << 2;
/* Clear the corresponding high control register bits */
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
/* Write the mode configuration in the corresponding bits */
tmpreg |= (currentmode << pos);
/* Reset the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
/* Set the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
GPIOx->CRH = tmpreg;
}
}
GPIO_Init()函数分析
这个函数是STM32微控制器的库函数,用于初始化GPIO(通用输入输出)端口。GPIO端口可以被配置为不同的模式,用于输入、输出或者作为其他功能的接口。
函数的原型是:
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
参数说明:
GPIOx: 一个指向GPIO端口的指针,其中x可以是A到G之间的字母,代表不同的GPIO端口。GPIO_InitStruct: 一个指向GPIO_InitTypeDef结构体的指针,该结构体包含了要初始化的GPIO端口的配置信息。
GPIOA是一个指向GPIOA端口的指针,所以它本身就是一个地址,不需要加上&。GPIO_InitStructure是一个GPIO_InitTypeDef类型的结构体变量,当你想传递这个结构体到函数中时,你需要传递它的地址,因此前面需要加上&。
函数功能:
- 初始化指定的GPIO端口,根据
GPIO_InitStruct中提供的配置信息。 - 配置GPIO端口的工作模式(如输入、输出、上拉/下拉等)。
- 配置输出速度(如果端口被配置为输出)。
使用方法:
- 定义一个
GPIO_InitTypeDef类型的变量(结构体实例),并设置其成员,以指定要初始化的GPIO端口的配置。 - 调用
GPIO_Init函数,传入GPIO端口的地址和配置结构体的地址。
GPIO_InitTypeDef:
GPIO_InitTypeDef 是一个结构体类型,用于定义GPIO端口的初始化参数。当您需要初始化一个GPIO端口时,您需要创建一个这种类型的变量(通常称为结构体实例),我们一般命名这个结构体实例为GPIO_InitStructure,并设置其成员变量,以指定您希望如何配置GPIO端口。
示例:
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; // 设置要初始化的引脚,这里以GPIO的第0个引脚为例
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 设置为推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置输出速度
GPIO_Init(GPIOA, &GPIO_InitStructure); // 对GPIOA的第0个引脚进行初始化
函数内部分析:
- 函数首先通过断言(
assert_param)检查传入的参数是否有效。 - 然后,它根据
GPIO_InitStruct中的模式和速度设置,计算出当前模式的值,并根据引脚是低8位还是高8位来配置相应的控制寄存器(CRL或CRH)。 - 如果模式是输入且带有上拉或下拉,则会设置或重置ODR(输出数据寄存器)相应的位。
对小白的讲解:
想象一下,GPIO端口就像你家的电灯开关,你可以通过不同的方式控制它。这个函数就是用来告诉你的STM32微控制器,如何正确地设置这个开关。你需要告诉微控制器,你想要控制的是哪一个开关(通过GPIOx指定),以及你想要如何控制它(通过GPIO_InitStruct中的配置)。
例如,如果你想要一个开关可以控制LED灯的亮和灭,你就需要设置这个开关为输出模式,并且告诉微控制器,当输出高电平时LED亮,输出低电平时LED灭。
GPIO_Init()函数代码使用
第一个参数GPIOx
第一个参数GPIOx,其中x可以是A到G,来选择你要配置哪个GPLIO,那我们是PC13口的LED,所以第一个参数就写GPIOC。
@param GPIOx: where x can be (A..G) to select the GPIO peripheral.
第二个参数是一个GPIO_InitTypeDef类型的结构体变量
第二个参数是一个GPIO_InitTypeDef类型的结构体变量。
@param GPIO_InitStruct: pointer to a GPIO_InitTypeDef structure that
* contains the configuration information for the specified GPIO peripheral.
我们需要先定义一个结构体,在上面我们先把这个结构体的类型写上,然后给结构体起个名字。这个名字可以随便起,但是根据官方的推荐,我们最好起这样的名字,叫GPIO_InitStructure。
然后我们把结构体的每一个参数填上,复制粘贴结构体的名字,然后用点来引出结构体的参数。可以看到这个结构体有三个参数,分别是GPIO模式、GPIO端口、GPIO速度。我们先把这三个参数都罗列出来。
GPIO_InitTypeDef (结构体类型)的定义:
typedef struct
{
uint16_t GPIO_Pin; /*!< Specifies the GPIO pins to be configured.
This parameter can be any value of @ref GPIO_pins_define */
GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the speed for the selected pins.
This parameter can be a value of @ref GPIOSpeed_TypeDef */
GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected pins.
This parameter can be a value of @ref GPIOMode_TypeDef */
}GPIO_InitTypeDef;
💡知识回顾:C语言中typedef结构体的用法
在C语言中,typedef 结合结构体定义是一种非常实用的特性,用于为结构体创建一个更简洁、更易读的别名。这不仅让代码更加清晰,也使得程序员在声明和使用结构体变量时更为便捷。下面详细介绍其用法:
一、基本语法
基本的 typedef 结构体定义语法如下:
typedef struct tag {
// 结构体成员定义
数据类型 成员名1;
数据类型 成员名2;
...
} 自定义类型名;
- tag:这是结构体的标签,可选的,用于指明结构体的类型。在
typedef语句中,这个标签有时会被省略,特别是在你不需要直接通过结构体标签来声明变量时。 - 自定义类型名:这是通过
typedef关键字创建的新类型名称,之后可以用这个名称直接声明结构体变量,无需再写struct关键字。
二、简化定义与使用
1、完整示例
typedef struct Point {
int x;
int y;
} PointType;
PointType p1, p2; // 直接使用PointType声明变量p1和p2
在这个例子中,struct Point 定义了一个包含两个整型成员 x 和 y 的结构体,typedef 则为这个结构体定义了一个别名 PointType。之后就可以直接使用 PointType 来声明结构体变量,而不需要写成 struct Point 形式。
2、匿名结构体与typedef
有时,结构体定义中不提供标签,这时 typedef 更显得尤为重要,因为它允许你为匿名结构体提供一个类型名:
typedef struct {
int a;
char b;
} MyStruct;
MyStruct example; // 使用MyStruct声明变量
三、优点
- 提高代码可读性:通过给复杂的结构体类型起一个有意义的名字,可以让其他阅读代码的人更容易理解其用途。
- 简化声明:直接使用类型别名声明变量,代码更简洁,减少出错机会。
- 便于维护和扩展:修改结构体定义时,只需更改一处即可全局生效,尤其是当该类型被广泛使用时。
四、注意事项
- 当定义结构体成员时,注意对齐和大小端问题,可能影响内存使用效率。
- 如果结构体较大,考虑使用指针而非直接实例化,以节省栈空间。
- 虽然
typedef可以让代码更易读,过度使用也可能导致代码难以理解,特别是当类型名没有清晰表达其含义时。
通过合理利用 typedef 结构体定义,可以使C语言的编程更加高效、清晰。
所以在这里,GPIO_InitTypeDef等价为struct,代表结构体类型。
GPIO_InitTypeDef GPIO_InitStructure; 也就意味着创建了一个结构体实例GPIO_InitStructure。
GPIO_InitStructure.GPIO_Mode
代码:GPIO_Mode的定义
typedef struct
{
uint16_t GPIO_Pin; /*!< Specifies the GPIO pins to be configured.
This parameter can be any value of @ref GPIO_pins_define */
GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the speed for the selected pins.
This parameter can be a value of @ref GPIOSpeed_TypeDef */
GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected pins.
This parameter can be a value of @ref GPIOMode_TypeDef */
}GPIO_InitTypeDef;
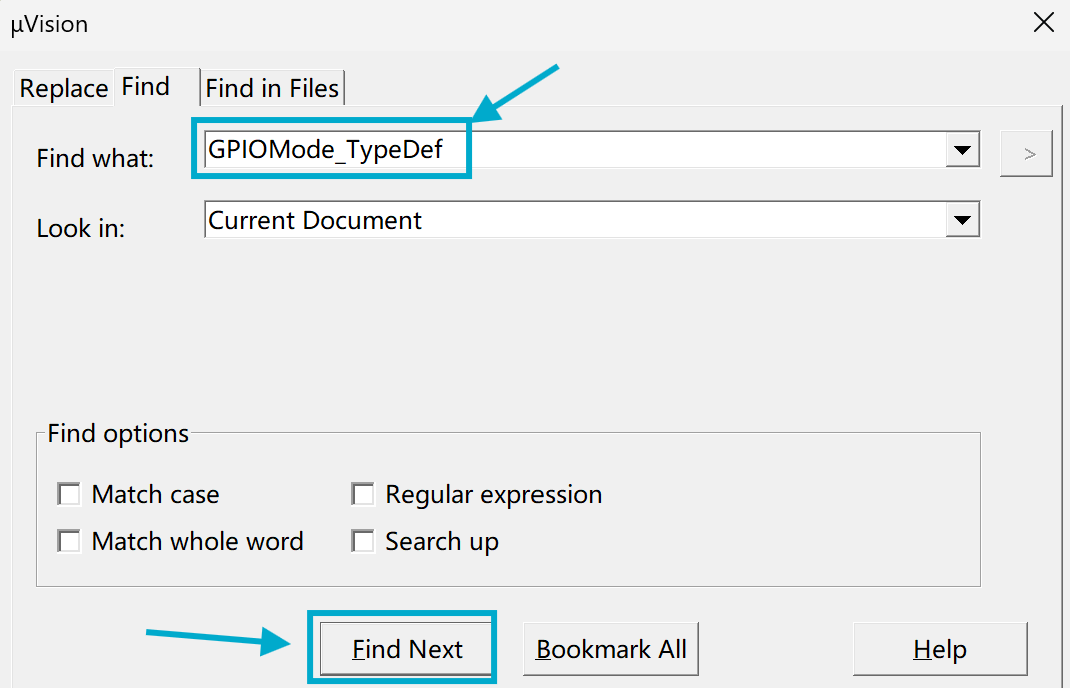
这右边的介绍说,这个参数可以是GPIOMode_TypeDef里面的一个值。因为这是注释里面的东西,所以没办法用右键跳转了。
那这里我们需要选中GPIOMode_TypeDef这个字符,按一下Ctrl+F,搜索一下这个定义的位置。点击find next,可以看到这是个枚举。GPIOMode就是这里的其中一个值。
图:搜索GPIOMode_TypeDef
代码:GPIOMode_TypeDef 的定义
typedef enum
{ GPIO_Mode_AIN = 0x0,
GPIO_Mode_IN_FLOATING = 0x04,
GPIO_Mode_IPD = 0x28,
GPIO_Mode_IPU = 0x48,
GPIO_Mode_Out_OD = 0x14,
GPIO_Mode_Out_PP = 0x10,
GPIO_Mode_AF_OD = 0x1C,
GPIO_Mode_AF_PP = 0x18
}GPIOMode_TypeDef;
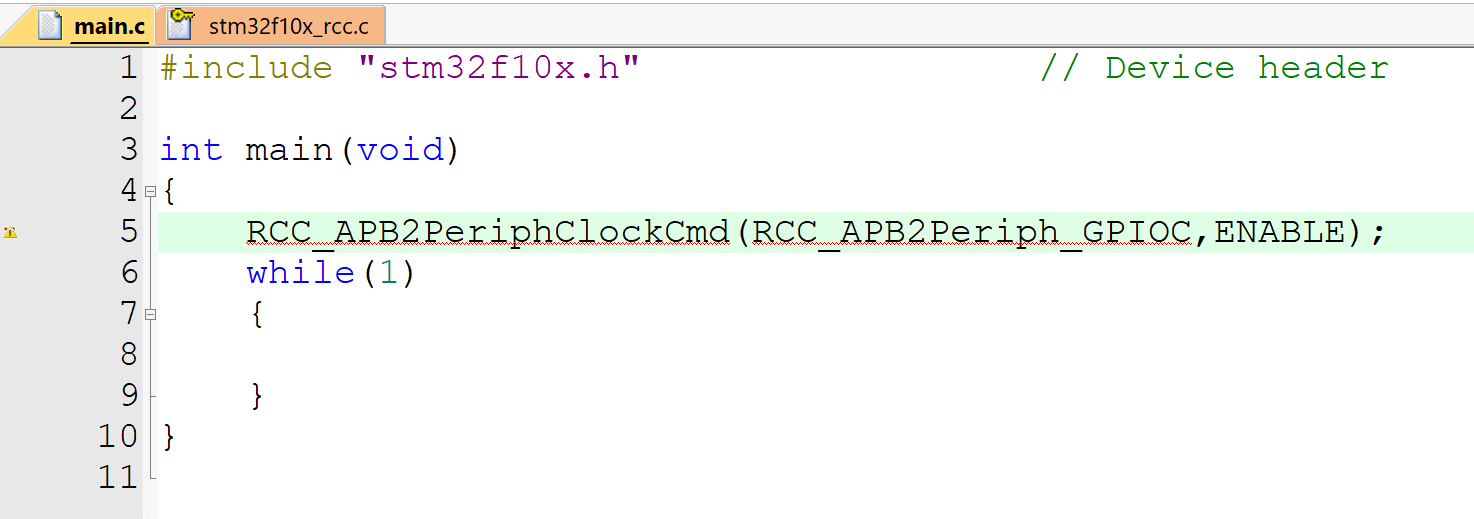
然后我们选择Out_PP这一项,复制,这个就是通用推挽输出。
然后在这里写上GPIO_Mode_Out_PP,这样这个参数就配置好了。
编写代码:main.c中配置好了GPIO_InitStructure.GPIO_Mode
#include "stm32f10x.h" // Device header
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = ;
GPIO_InitStructure.GPIO_Speed = ;
GPIO_Init(GPIOC,);
while(1)
{
}
}
GPIO_InitStructure.GPIO_Pin
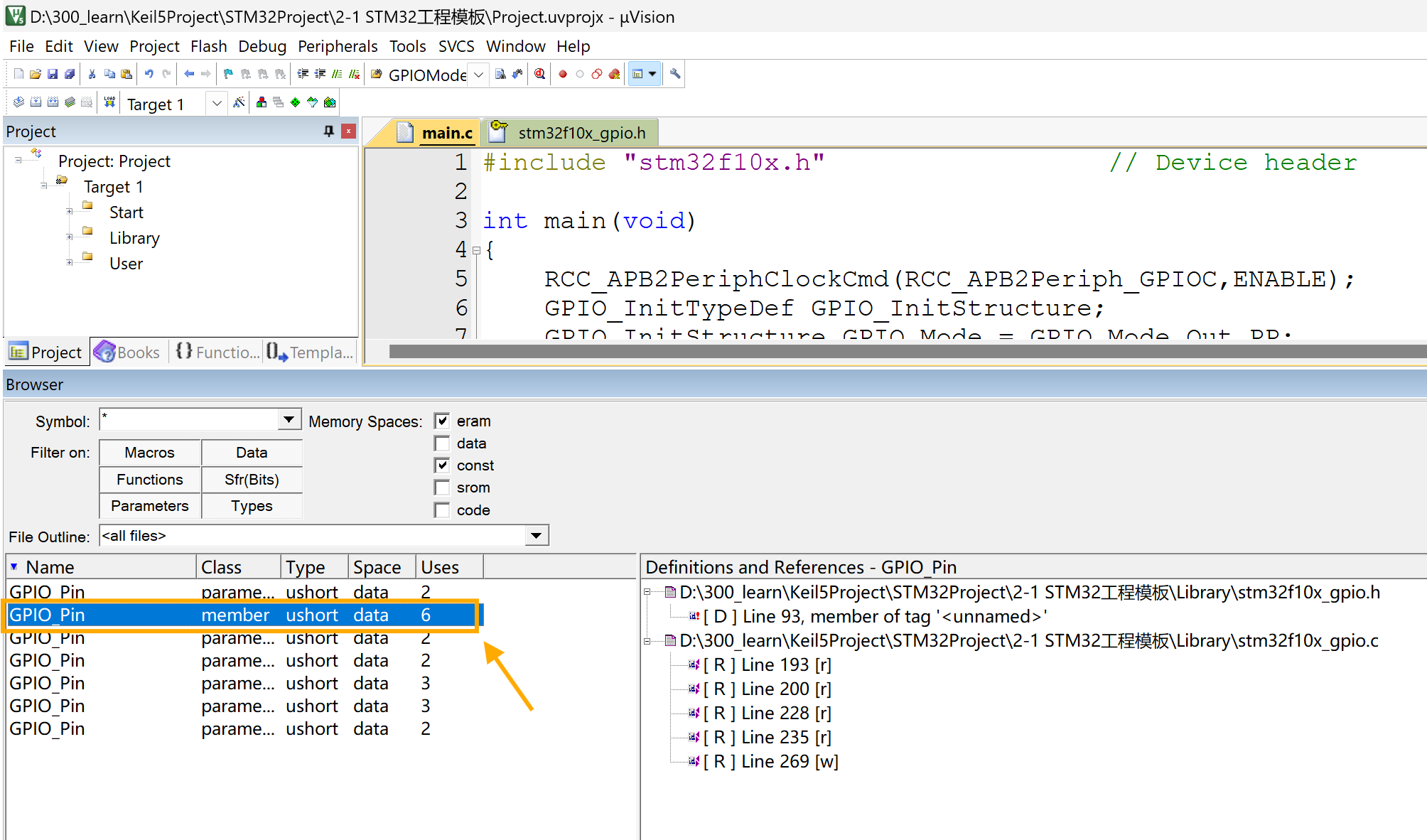
然后我们继续看一下下一个参数,转到它的定义这里下面出现了一个框,这个是说它的定义有很多个。
图:GPIO_Pin的定义有很多个
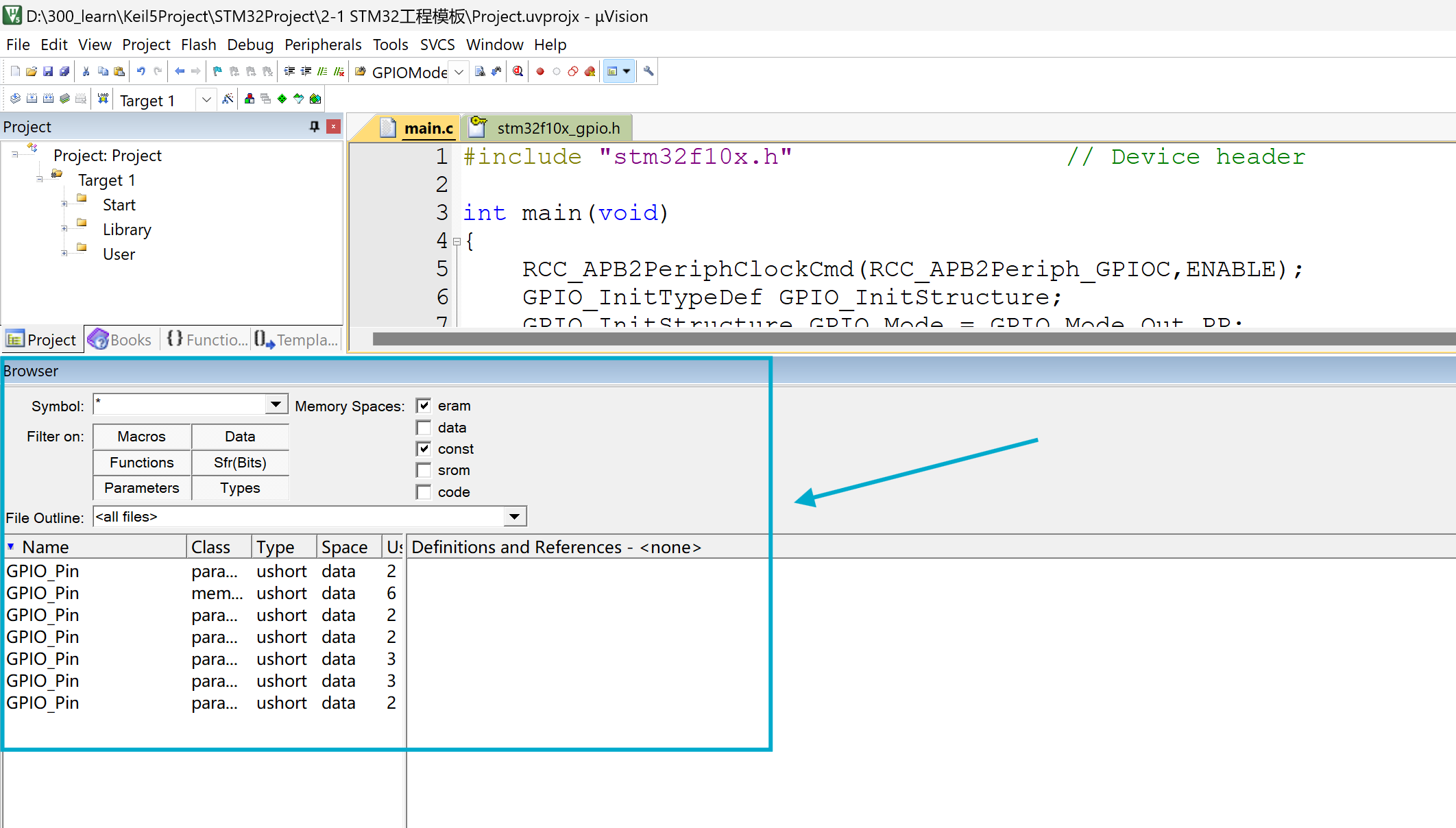
我们来看一下,我们选择这个member这一项,双击,然后跳转的其实还是刚才那个位置。
图:双击 GPIO_Pin的member这一项
代码:GPIO_Pin的定义
typedef struct
{
uint16_t GPIO_Pin; /*!< Specifies the GPIO pins to be configured.
This parameter can be any value of @ref GPIO_pins_define */
GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the speed for the selected pins.
This parameter can be a value of @ref GPIOSpeed_TypeDef */
GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected pins.
This parameter can be a value of @ref GPIOMode_TypeDef */
}GPIO_InitTypeDef;
然后看一下这个GPIO_Pin的说明,他说这个参数在GPIO_pins_define里面定义了,我们还是一样选中,Ctrl+F,find next。
可以看到这里有个宏定义的列表,我们选择GPIO_Pin_13,复制,然后填在第二个位置。
代码:stm32f10x_gpio.h中GPIO_pins_define
/** @defgroup GPIO_pins_define
* @{
*/
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< Pin 0 selected */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< Pin 1 selected */
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< Pin 2 selected */
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< Pin 3 selected */
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< Pin 4 selected */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< Pin 5 selected */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< Pin 6 selected */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< Pin 7 selected */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< Pin 8 selected */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< Pin 9 selected */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< Pin 10 selected */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< Pin 11 selected */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< Pin 12 selected */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< Pin 13 selected */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< Pin 14 selected */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< Pin 15 selected */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< All pins selected */
#define IS_GPIO_PIN(PIN) ((((PIN) & (uint16_t)0x00) == 0x00) && ((PIN) != (uint16_t)0x00))
#define IS_GET_GPIO_PIN(PIN) (((PIN) == GPIO_Pin_0) || \
((PIN) == GPIO_Pin_1) || \
((PIN) == GPIO_Pin_2) || \
((PIN) == GPIO_Pin_3) || \
((PIN) == GPIO_Pin_4) || \
((PIN) == GPIO_Pin_5) || \
((PIN) == GPIO_Pin_6) || \
((PIN) == GPIO_Pin_7) || \
((PIN) == GPIO_Pin_8) || \
((PIN) == GPIO_Pin_9) || \
((PIN) == GPIO_Pin_10) || \
((PIN) == GPIO_Pin_11) || \
((PIN) == GPIO_Pin_12) || \
((PIN) == GPIO_Pin_13) || \
((PIN) == GPIO_Pin_14) || \
((PIN) == GPIO_Pin_15))
/**
* @}
*/
编写代码:main.c中配置好了GPIO_InitStructure.GPIO_Pin
#include "stm32f10x.h" // Device header
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = ;
GPIO_Init(GPIOC,);
while(1)
{
}
}
GPIO_InitStructure.GPIO_Speed
第三个参数也是一样,右键,跳到定义,选中,Ctrl+F, find next。
代码:stm32f10x_gpio.h中GPIOSpeed_TypeDef
typedef enum
{
GPIO_Speed_10MHz = 1,
GPIO_Speed_2MHz,
GPIO_Speed_50MHz
}GPIOSpeed_TypeDef;
在这里选中50MHz的速度复制,在这里粘贴,最后别忘了分号。
编写代码:main.c中配置好了GPIO_InitStructure.GPIO_Speed
#include "stm32f10x.h" // Device header
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,);
while(1)
{
}
}
那结构体变量就有了,我们就可以填这个GPIO_Init的第二个参数了。在这里有说明,这个第二个参数是一个指向结构体的指针,所以这里我们需要传递结构体的地址。
那我们复制结构体的名字粘贴到这个位置,然后前面加上一个取地址(&)的符号,最后打成一个右括号,分号,这个GPIO模式配置就完成了。
编写代码:GPIO模式配置完成
#include "stm32f10x.h" // Device header
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
while(1)
{
}
}
这个配置的操作方式看上去比较难理解,但是STM32的这种方式都是固定的,大家多打几次就知道怎么用了。
最后我们设置端口的高低电平来进行点灯。这里有个函数GPIO_SetBits,这个就可以把指定端口设置为高电平。大家也可以右键去看一下参数的说明,那这里我就直接填了。
第一个是GPIOC,第二个是GPIO_Pin_13。这一句就可以将PC13号口置为高电平,接下来自低电瓶也有函数叫GPIO_ResetBits。参数同样是GPIO_Pin_13,这一句就可以将PC13号口置为低电平。
那我们依次试一下,我们先把高电平的注释掉。编译。下载。
编写代码:设置PC13号口为低电平,点亮LED灯
#include "stm32f10x.h" // Device header
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
//GPIO_SetBits(GPIOC,GPIO_Pin_13);
GPIO_ResetBits(GPIOC,GPIO_Pin_13);
while(1)
{
}
}
可以看到灯已经亮了。
图:PC13号口的LED灯亮
再把低电平的注释掉,编译。
编写代码:设置PC13号口为高电平,熄灭LED灯
#include "stm32f10x.h" // Device header
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_13);
//GPIO_ResetBits(GPIOC,GPIO_Pin_13);
while(1)
{
}
}
可以看到灯就灭了。
图:PC13号口的LED灯灭
这就是使用库函数的基本操作了。这节把下节的课也带着讲了。这至于STM32 GPIO口的结构,结构体和库函数的操作,这些我们下节再详细解释。
本节我们先来用一下,来测试一下我们的工程。
有关新建工程的部分,我们这节大概就介绍完了。最后还要补充几点,来看一下PPT。
新建工程里启动文件的选择
首先是新建工程里的启动文件选择,我们新建工程第一个加的就是启动文件。这个启动文件有很多类型,至于选择哪一个,我们要根据芯片型号来选择。
图:STM32F1系列的启动文件一览
STM32F1系列型号分类表
我们看到这个表,这里是STM32F1系列中的型号分类。
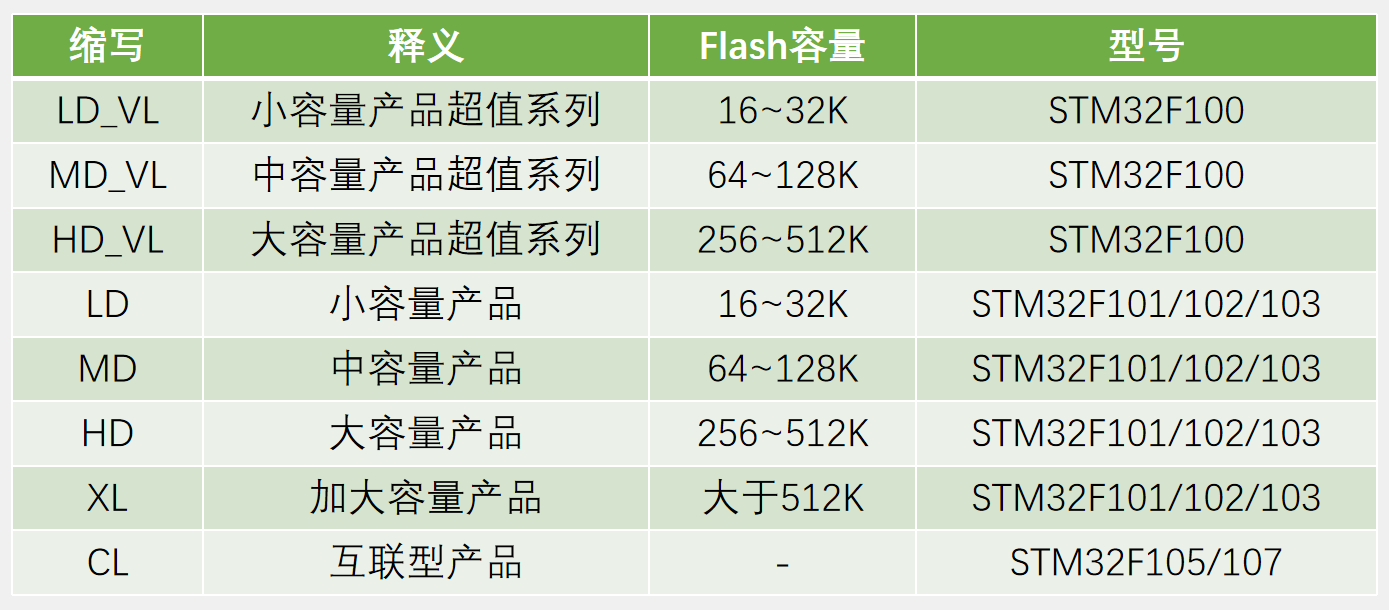
其中根据Flash的大小,分为了小容量产品,Flash为16~32K,简写为LD(Low Density)。
中容量产品,Flash为16~128K,简写为MD(Medium Density)。
大容量产品,Flash为256~512克,简写为HD(High Density)。
加大容量产品,Flash大于512K,简写为XL(EXtra Large)。
那STM32F100的系列,ST把它叫做超值系列,简写为VL(Value Line)。
SDM32F105和107。ST把它叫做互联型产品(CL, Connectivity Line)。这个就没有根据Flash大小再分类了。
所以就有了这个表。
STM32F1系列型号分类表的使用
1、STM32F100型号
如果你使用STM32F100的型号,就选择带VL的启动文件,然后再根据Flash的大小选择LD、MD还是HD。
2、STM32F101/102/103的型号
如果你使用STM32F101/102/103的型号,就选择不带VL的,然后根据Flash的大小选择LD、MD、HD还是XL。
3、STM3F105/107的型号
如果你使用STM3F105/107的型号,直接选择CL的启动文件即可。
那在这里我们可以看一下,这个启动文件后面带的字母和我这个表的字母都是对应的。
这样我们就知道了我们这个STM32F103的芯片就需要选择这四列(LD、MD、HD还是XL)。又因为C8T6的Flash是64K所以选择MD的启动文件(也就是startup_stm32f10x_md.s)。
这就是STM32F1系列的型号分类和启动文件的选取。
新建工程步骤
接下来我们再总结一下新建工程的步骤。
第一步
第一步、建立工程文件夹,Keil中新建工程,选择型号。
第二步
第二步、工程文件夹里建立Start、Library、User等文件夹,复制固件库里面的文件到工程文件夹。
这一步是为了添加工程文件准备的。建文件夹是因为文件比较多,需要分类管理一下。
这个文件夹的名称和数量没有限制,大家也可以根据自己的理解来建,这都是可以的。
另外需要用的文件一定要复制到工程文件夹里面来,不要添加工程文件夹外面的文件,要不然你外面的文件一旦挪位置,工程里就找不到文件了。所以我们要复制文件到工程里来,保持工程的独立性。
第三步
第三步、工程里对应建立Start、Library、User等同名称的分组,然后将文件夹内的文件添加到工程分组里。
这一步的原因是在Keil里方便管理文件,因为Keil没法直接添加文件夹,所以还得重复一下。
这个添加文件我是把所有的.h文件和.c文件都添加进来了。因为.h文件是不参与编译的,所以其他很多工程都是不添加.h文件的。
但是我认为把.h文件加进来比较方便,而且.h文件也是需要经常打开看的,所以我比较习惯把所有的文件都添加进来。
第四步
第四步、工程选项,C/C++,Include Paths内声明所有包含头文件的文件夹
这一步是因为你这个Start、Library等文件夹是你自己建的,Keil软件它并不知道。所以你要用自己文件夹里面的.h文件,就必须声明一下这个路径,那最好就是你自己建的所有文件夹都声明一下,这样就不会出现.h文件找不到的问题了。
第五步
第五步、工程选项,C/C++,Define内定义USE_STDPERIPH_DRIVER(标准外设驱动),使用标准外设驱动这个字符串。
这是使用库函数的条件编译,使用库函数就必须定义这个。另外其他的工程在这个位置还声明了一个STM32F10X_MD的字符串。
那根据我的调查,Keil5在新建工程后自动就帮我们声明好了,这个不需要再额外申请声明了。所以在这个位置只需要声明使用USE_STDPERIPH_DRIVER(标准外设驱动)的字符串即可。
第六步
第六步、工程选项,Debug,下拉列表选择对应调试器,Settings,Flash Download里勾选Reset and Run。
这个就是选择调试器来进行下载的选项了。我们用STLINK就选择STLINK的那一项即可。
结束
这就是新建工程的基本步骤。新建工程也是很灵活的,大家只要符合要求,都可以编译通过。每个人建工程的风格也不同,大家学会了之后也可以建立一个属于自己风格的工程。
工程架构
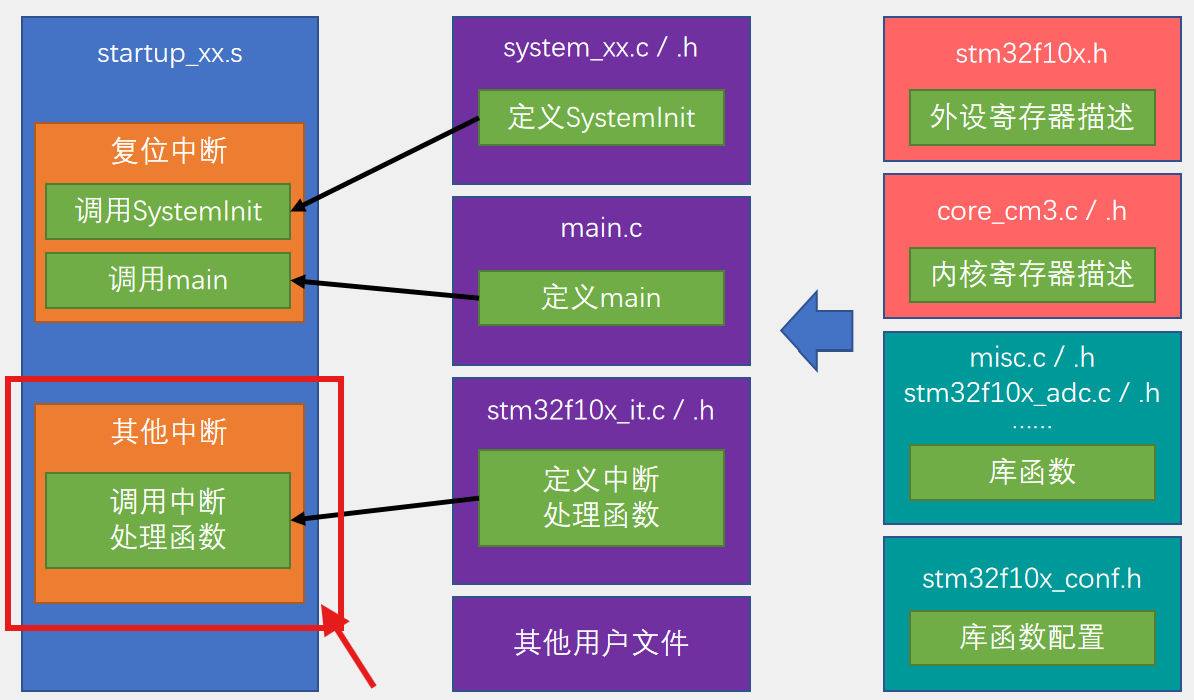
最后我再额外的讲一下这个工程的架构,来看一下这个工程的每个文件都是干啥的,为啥需要这些文件?
图:工程架构
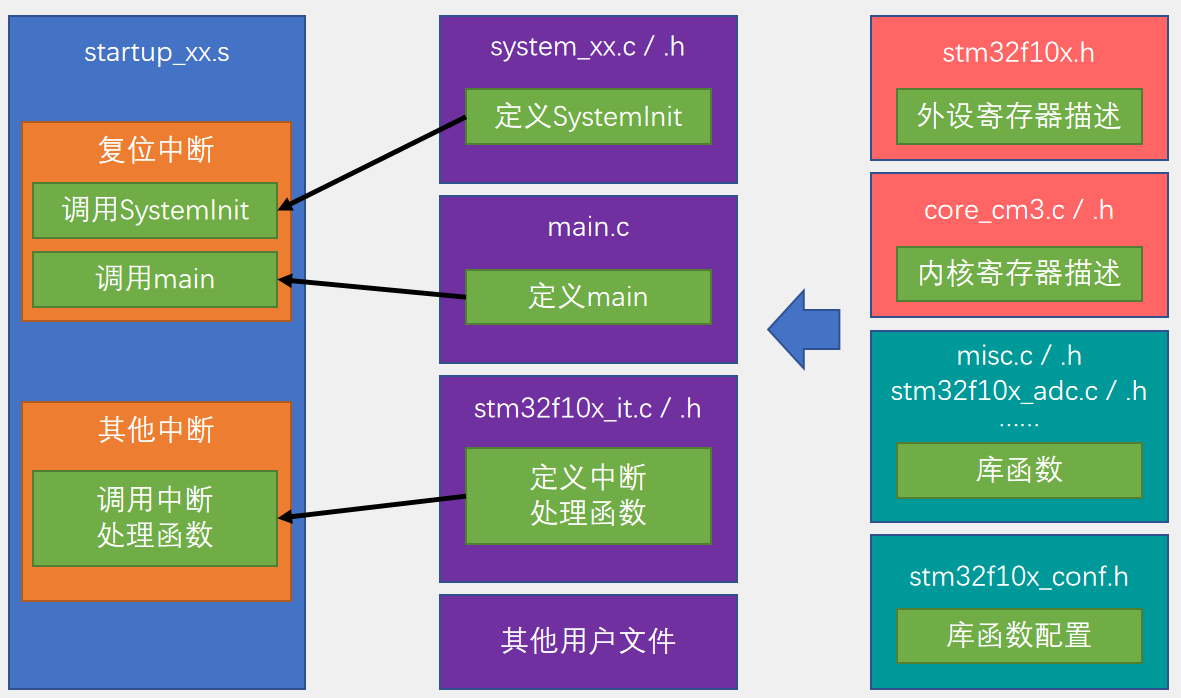
startup启动文件
我们看到这个图,首先是startup启动文件,这个是程序执行的最基本的文件。
图:Keil中启动文件
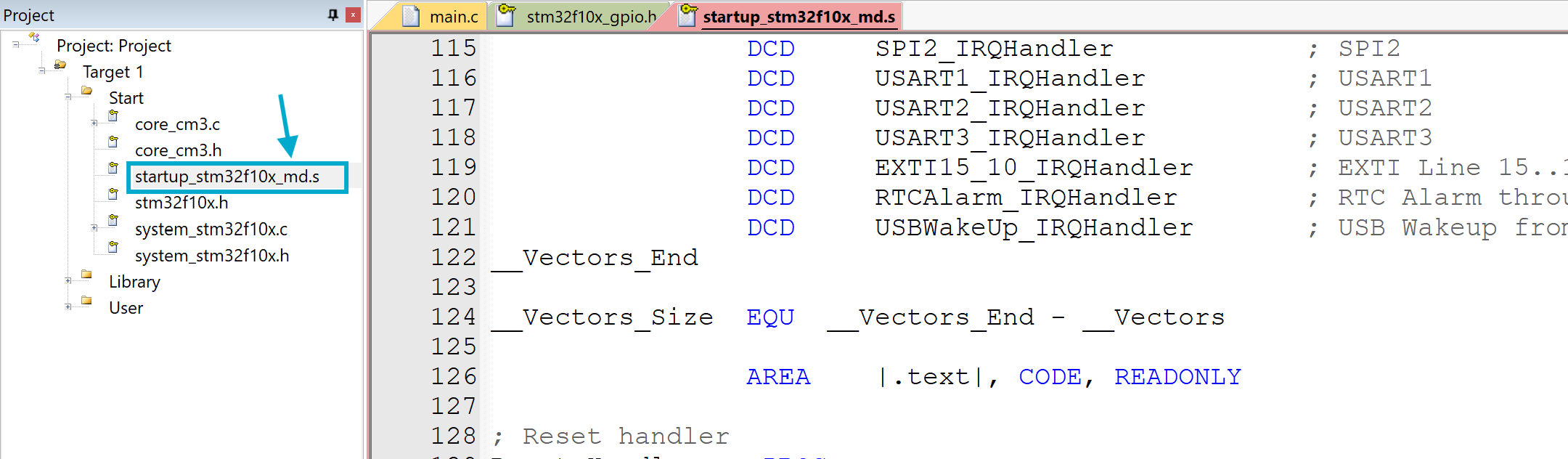
我们可以看到Keil中启动文件是用汇编写的,启动文件内定义了中断向量表、中断服务函数等。
这个中断服务函数中有个复位中断,这就是整个程序的入口,当STM32上电复位或者按下复位按键之后,程序就会进入复位中断函数执行。
复位中断函数主要就做了两件事情。第一个是调用SystemInit函数,第二个是调用main函数。
图:复位中断函数
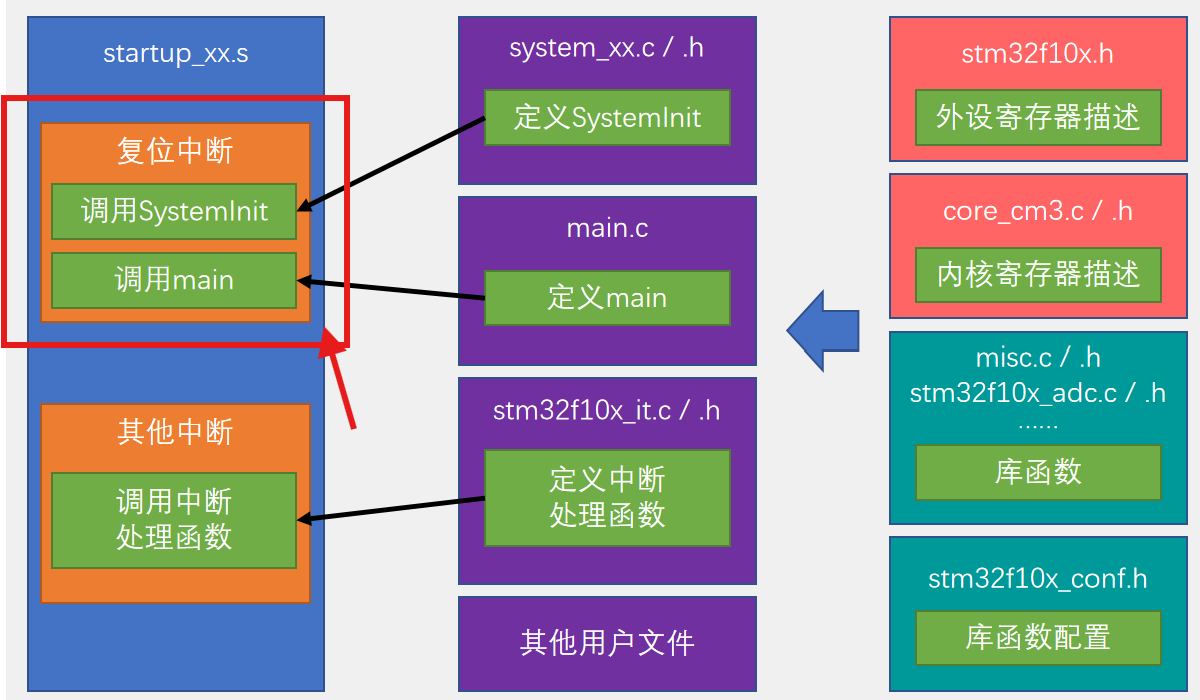
对应启动文件的这里。
图:startup_stm32f10x_md.s中 复位中断函数
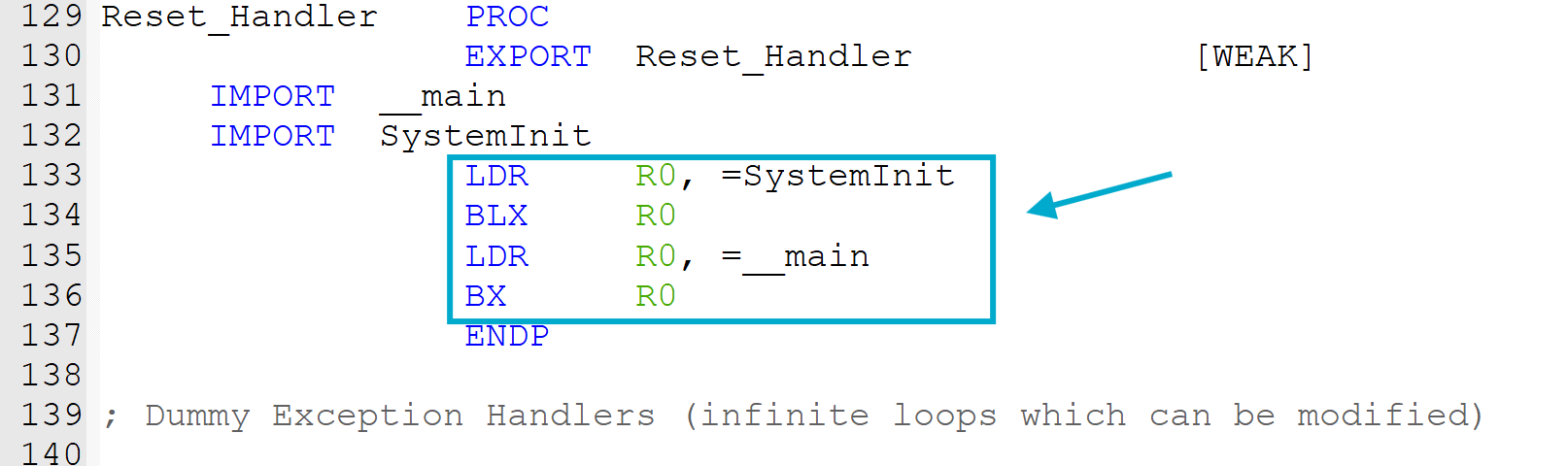
这里可以看到这是复位的中断函数,然后调用SystemInit,再调用main,然后程序就结束了。
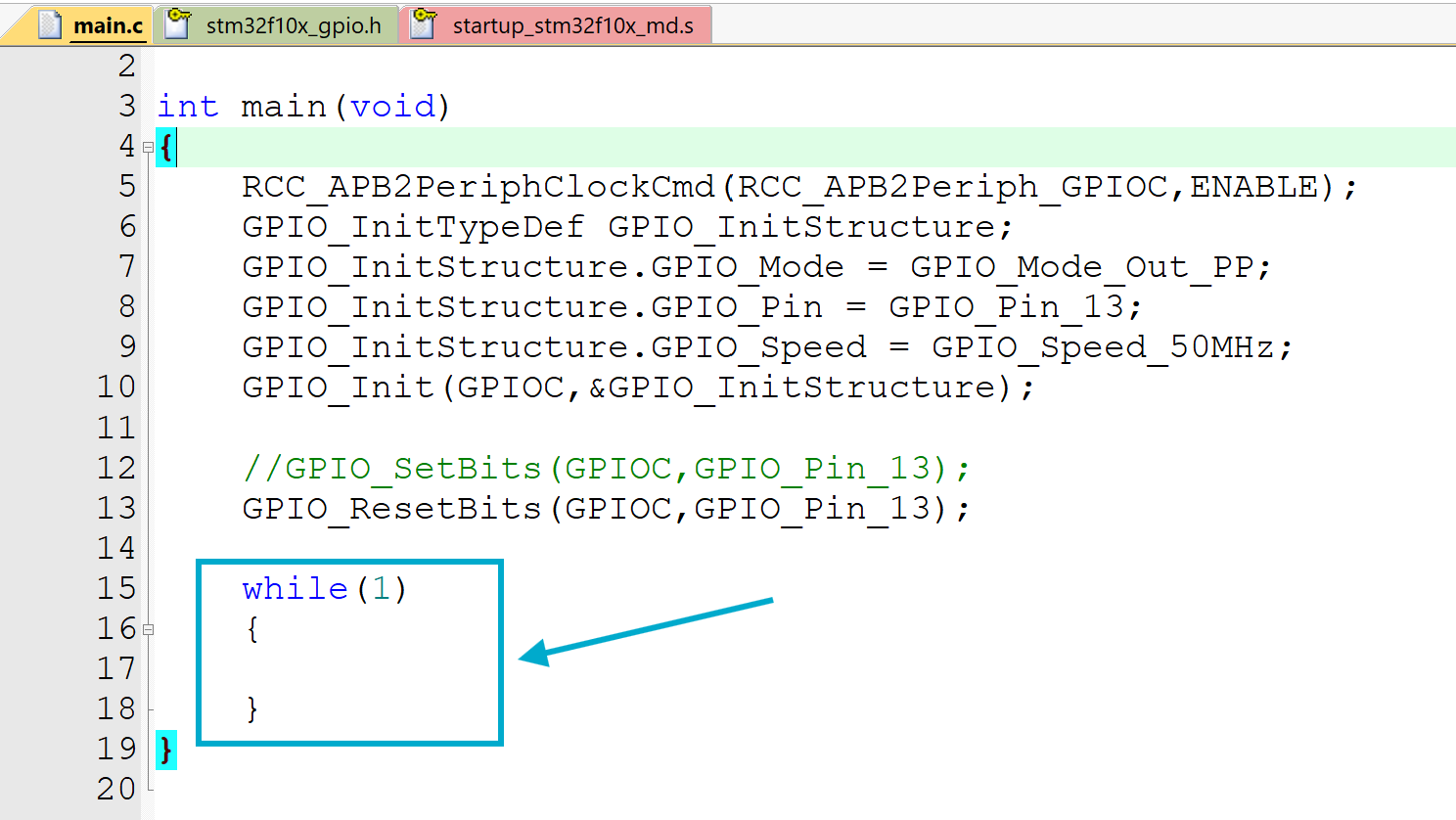
当然实际上单片机的程序永远也不会结束,所以在main函数的最后一定是一个死循环。
图:main.c中 while(1)死循环
SystemInit函数就是定义在这个system开头的.c文件里的。
那在Keil里我们也可以看到这个函数的定义。
这里的简介写了这个函数的作用,是设置微控制器的启动,初始化嵌入式闪存接口、锁相环、更新系统内核的时钟变量。
下面的note写的是这个函数仅在复位后需要调用。
那下面这些就是用来配置这些东西的,这个也不需要我们更改,我们只需要知道在main函数之前,单片机就已经执行了一堆东西了。
帮我们把这个闪存接口、时钟等一系列杂碎的东西都配置好了。
代码:system_stm32f10x.c中SystemInit函数定义
/**
* @brief Setup the microcontroller system
* Initialize the Embedded Flash Interface, the PLL and update the
* SystemCoreClock variable.
* @note This function should be used only after reset.
* @param None
* @retval None
*/
void SystemInit (void)
{
/* Reset the RCC clock configuration to the default reset state(for debug purpose) */
/* Set HSION bit */
RCC->CR |= (uint32_t)0x00000001;
/* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */
#ifndef STM32F10X_CL
RCC->CFGR &= (uint32_t)0xF8FF0000;
#else
RCC->CFGR &= (uint32_t)0xF0FF0000;
#endif /* STM32F10X_CL */
/* Reset HSEON, CSSON and PLLON bits */
RCC->CR &= (uint32_t)0xFEF6FFFF;
/* Reset HSEBYP bit */
RCC->CR &= (uint32_t)0xFFFBFFFF;
/* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */
RCC->CFGR &= (uint32_t)0xFF80FFFF;
#ifdef STM32F10X_CL
/* Reset PLL2ON and PLL3ON bits */
RCC->CR &= (uint32_t)0xEBFFFFFF;
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x00FF0000;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000;
#elif defined (STM32F10X_LD_VL) || defined (STM32F10X_MD_VL) || (defined STM32F10X_HD_VL)
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000;
#else
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000;
#endif /* STM32F10X_CL */
#if defined (STM32F10X_HD) || (defined STM32F10X_XL) || (defined STM32F10X_HD_VL)
#ifdef DATA_IN_ExtSRAM
SystemInit_ExtMemCtl();
#endif /* DATA_IN_ExtSRAM */
#endif
/* Configure the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers */
/* Configure the Flash Latency cycles and enable prefetch buffer */
SetSysClock();
#ifdef VECT_TAB_SRAM
SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM. */
#else
SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH. */
#endif
}
另外在启动文件还定义了STM32所有的其他中断,这些中断达到触发条件后就会自动执行。那在启动文件(system_stm32f10x.c)这下面,这都是其他的中断调用了。
图:STM32所有的其他中断
这个中转函数的定义,就是在stm32f10x_it.c里面。
图:中断函数的定义在stm32f10x_it.c里面
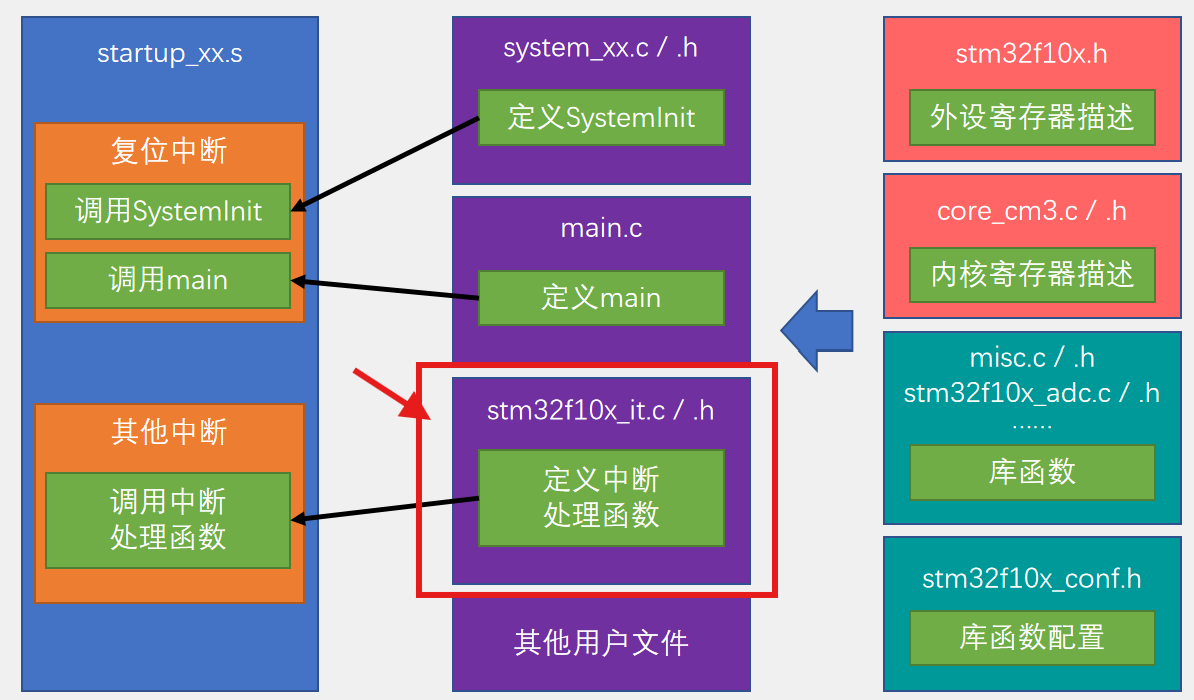
我们打开Keil可以看到。这些就是中转函数的定义。
最后ST还建议我们把自己的中断写在这个位置上。当然我们还是习惯在哪用中断就写在哪里,写在别的地方也是可以的。
图:stm32f10x_it.c里 ST还建议我们把自己的中断写在这个位置上
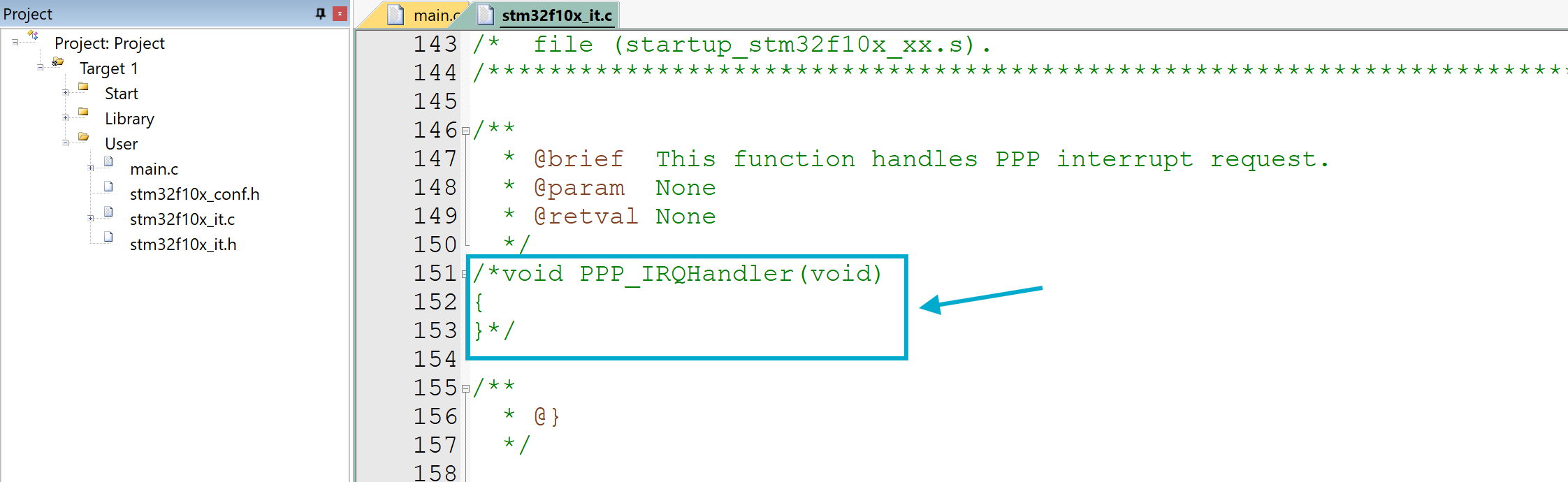
那这些就是中断部分的执行逻辑了。
另外你也可以自己定义一些用户文件,来封装一些模块供主函数和中断调用,这些也都是没问题的,同时也有利于我们程序结构的模块化,要不然所有的程序都堆在主函数里,那主函数也太长了,是吧?
STM32的资源:外设和内核外设的寄存器描述+库函数文件
到此为止,这个工程结构主动执行的部分就介绍完了。剩下右边的就是被动执行的东西了,相当于STM32的资源。我们在主函数或者中断函数里就可以调用这些资源。
右上角这2个stm32f10x.h和core_cm3这些文件就是外设和内核外设的寄存器描述。
图:工程架构中stm32f10x.h和core_cm3这些文件
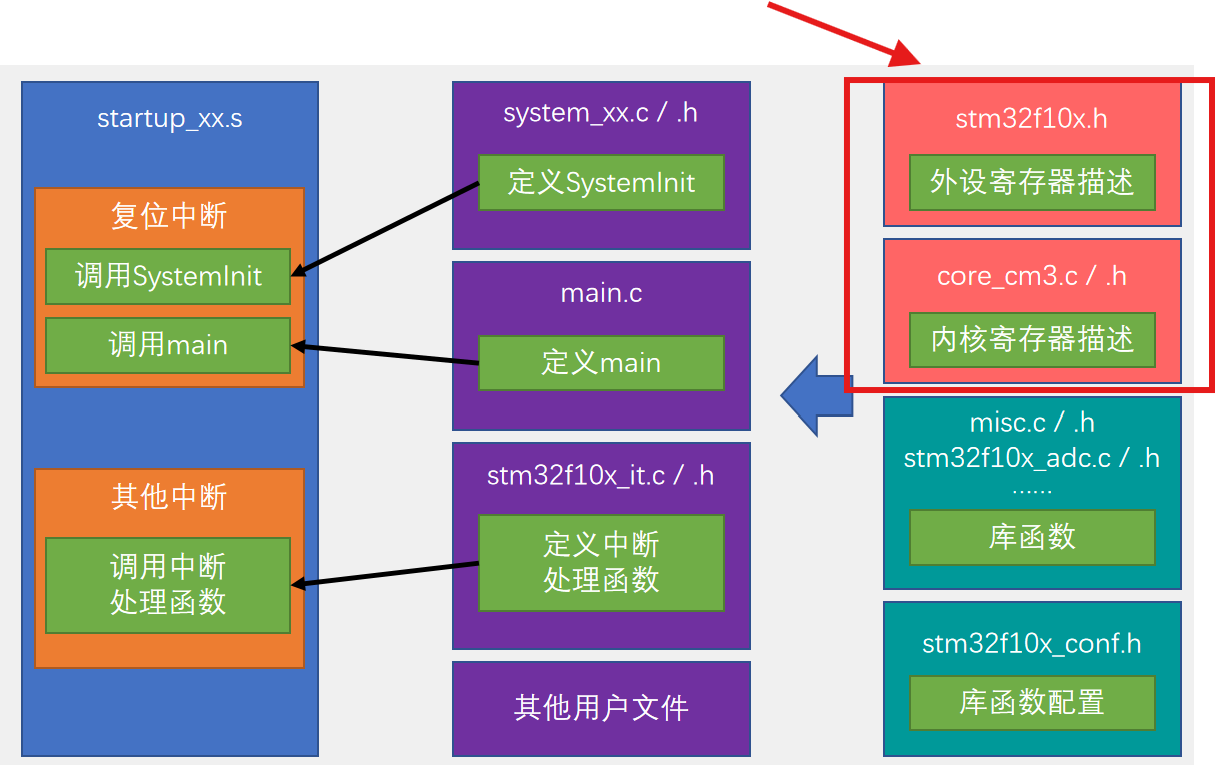
在Keil中我们可以看到。这里面都是寄存器和寄存器每一位的名字,还有地址信息等,如果直接调用这些寄存器来使用STM32,那就是寄存器的开发方式。
我们已经试过了,这种方式会有一些弊端,也比较麻烦。
所以ST公司就提供了下面这两个文件,这个就是库函数的文件。
图:ST公司提供的库函数文件
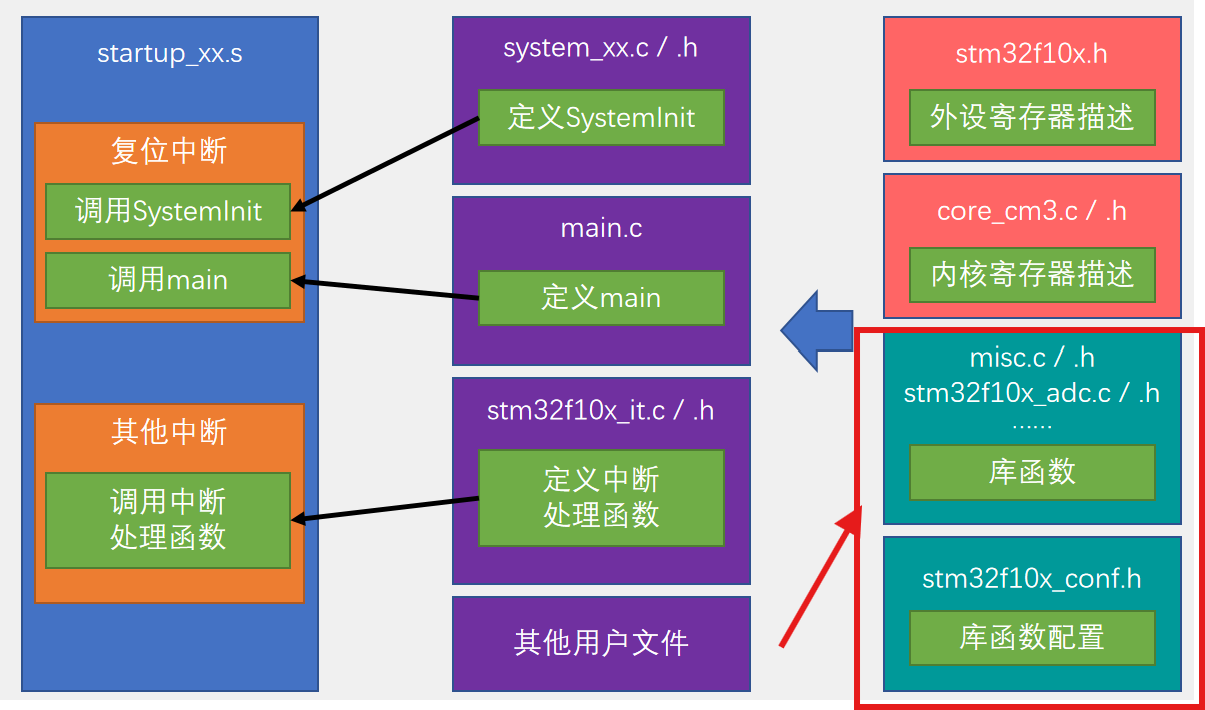
在Keil中可以看到这每个外设都提供了一大堆的函数,这些函数封装了寄存器的操作,给我们提供更加人性化的函数调用方式。只要学会了操作套路,那配置一个外设就是很简单的,连手册都不需要看一下。
这个conf文件就是用来配置头文件的包含关系的。
在Keil中我们可以看到在这里conf文件include了所有的库函数头文件。同时我们在stm32f10x.h的最后又包含了conf。
图:stm32f10x.h的最后又包含了conf
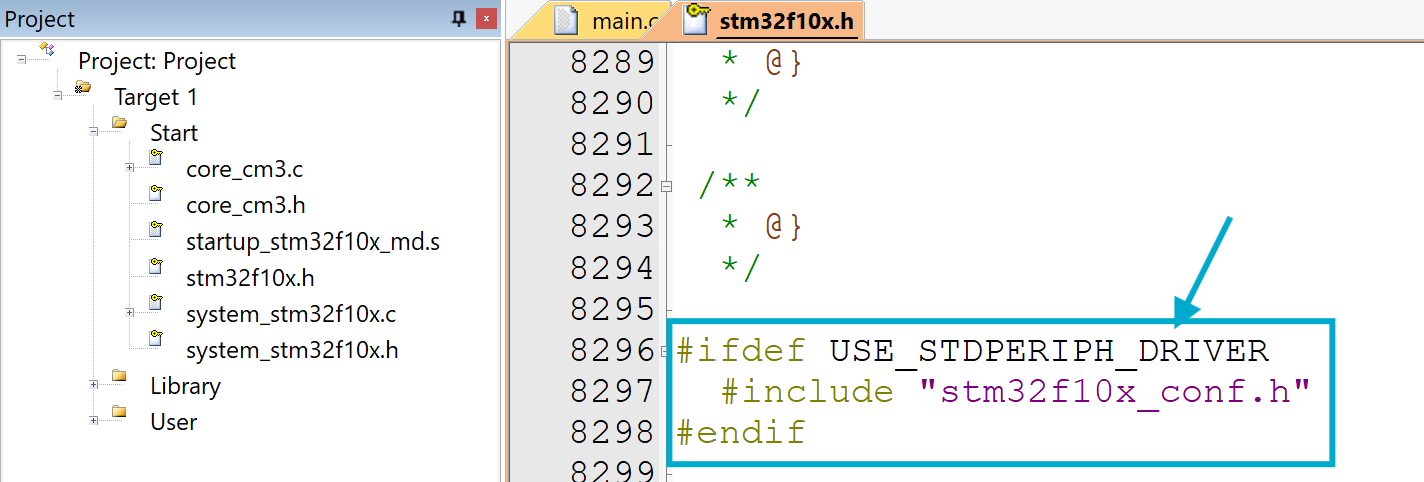
所以在使用这些库函数时,我们只需要包含stm32f10x.h这一个头文件,就相当于包含了所有的库函数头文件。这样我们就可以任意的调用库函数了。
这些就是整个工程的结构和每个文件的作用。好,以上就是我们我们本节课的所有内容。本节课我们建好了基于库函数的STM32工程,我们下一节就开始从这个工程上学习STM32的第一个外设GPIO了。
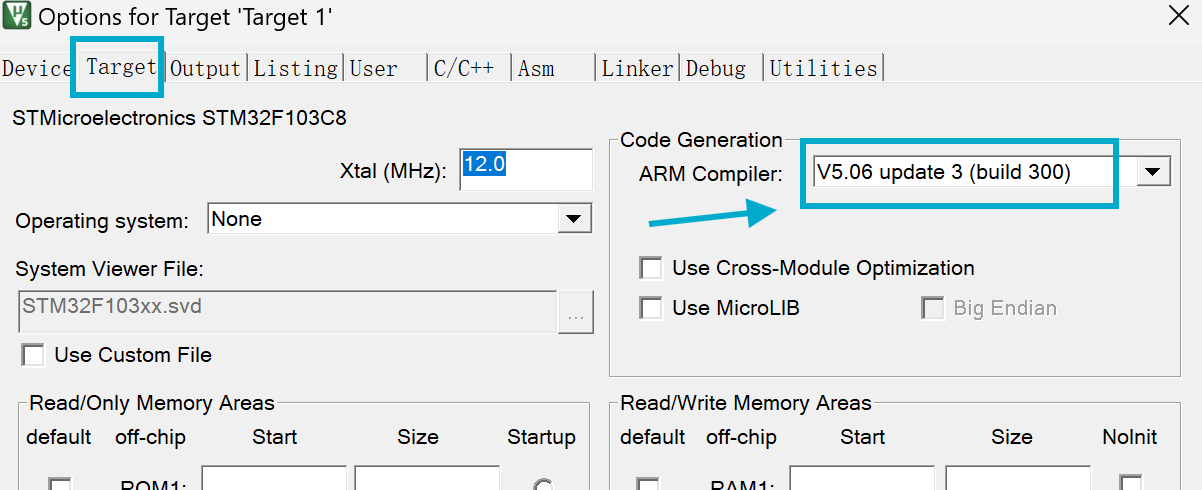
临时解决一个小问题:头文件报错
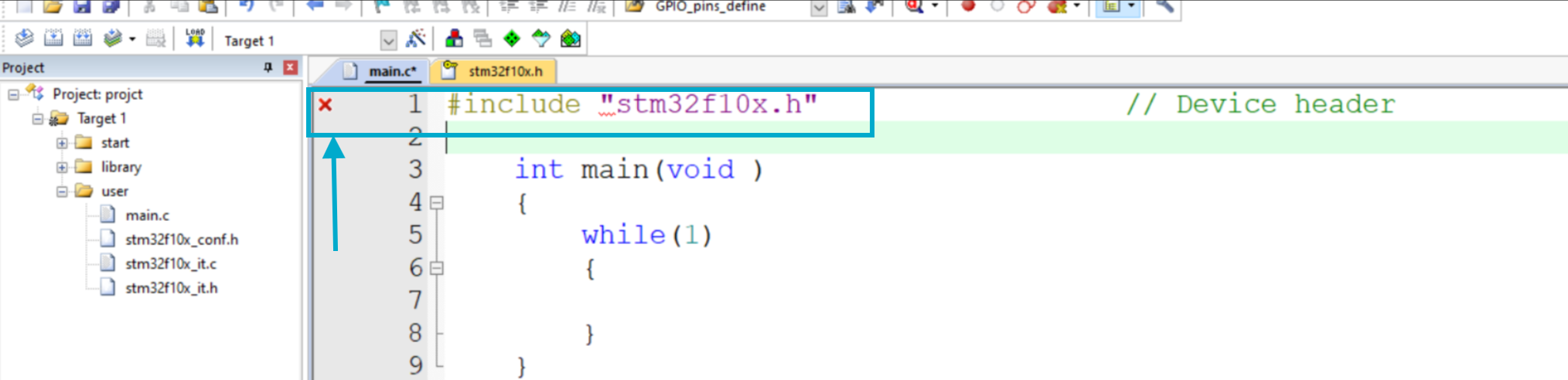
1.点击魔术棒
在Target栏目下,将ARM Compiler的级别选为如下图所示。
END
END:本节内容到此结束。
个人提升之余,别忘了和小伙伴积极交流,很多人觉得他们在思考,而实际上他们只是在重新整理自己的偏见。请珍惜和他人交流讨论的机会。
希望你每一天都有所收获,进步up up up。今天的我们并不比昨天更聪明,但一定要比昨天更睿智。
